Motorstyrning som funktion av ström
 Motorstyrning kan göras beroende på styrkan på statorströmmen. Startkretsen som funktion av strömmen hos en lindad rotorinduktionsmotor visas i fig. 1 a.
Motorstyrning kan göras beroende på styrkan på statorströmmen. Startkretsen som funktion av strömmen hos en lindad rotorinduktionsmotor visas i fig. 1 a.
I startögonblicket når strömmen värdet I1, och efter ett visst tidsintervall minskar den till värdet I2 (fig. b). Vid denna tidpunkt kortsluts automatiskt en del av startmotståndet i rotorkretsen, strömmen stiger till värdet I1 och sjunker sedan igen till värdet I2, vilket gör att ytterligare en del av startmotståndet kortsluts. Denna process upprepas tills alla stadier av startmotståndet är kortslutna. För dessa ändamål används ett överströmsrelä, vars lindningar ingår i motorns kraftkrets.
När du klickar på startknapp SB1 (se fig. A) aktiveras kontaktorn KM, vars huvudkontakter ansluter motorn till nätverket vid det gemensamma startmotståndet i rotorkretsen. I det här fallet får KA-reläets spole effekt, vars öppningskontakter är i kretsen för accelerationsspolen K1.KA-reläet är inställt så att svarstiden är kortare än för K1-kontaktorn. Dessutom bryts dess kontakter vid högsta tillåtna värde startström öppna, och när strömmen minskar till dess omkopplingsvärde, stänger de igen, på grund av vilket spolen K1 slås på genom kontakterna på reläet KA vid kortslutningstillfället för startmotståndssteget.
Relä KA kommer att fungera innan accelerationskontaktor K1 aktiveras, och motorn kommer att accelerera när startmotståndet är fullt infört. När startströmmen minskar kommer KA-reläets kontakter att stängas och spolen K1 slås på. Samtidigt stänger kontakten K1, vilket ger självförsörjning av spolen oberoende av reläet KA, och kontakten i styrkretsen öppnas, vilket förhindrar för tidig inkludering av acceleratorn K2.
Eftersom matningskontakterna K1 är en del av kortslutningen av startmotståndet, ökar statorströmmen till maxvärdet och reläet KA, när det utlöses, öppnar sina kontakter i matningskretsen till spolen K2. När motorn når tillräcklig hastighet och statorströmmen sjunker tillbaka till omkopplingsströmmen, kommer kontakterna på reläet KA att stängas och slå på spolen K2, som kortsluter det andra steget av startmotståndet till dess kontakter.
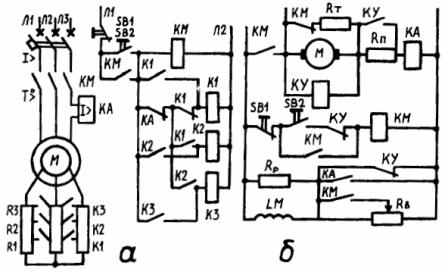
Ris. 1. Styrkretsar beroende på strömmen: a — Asynkronmotor med fasrotor; b — DC-motor med parallell magnetisering
I detta fall ökar statorströmmen igen, KA-reläet kommer att fungera och öppna sina kontakter. Spolen K2 kommer inte att tappa ström då den hinner stänga med hjälpkontakterna K2.En ytterligare minskning av statorströmmen efter nästa acceleration kommer att få lindningen K3 att slå på och kortsluta det sista steget i startmotståndet. Genom att trycka på SB-knappen stoppas motorn och kretsen är redo för nästa start. Genom att använda de strömreläer som är konfigurerade att återvända med en ström på 12, kan olika elektriska enheter stoppas och reverseras. Nackdelen med styrkretsar i strömfunktionen är det ganska stora antalet kontakter.
För irreversibel styrning av en parallellt exciterad likströmsmotor på flera kilowatt kan ett enda steg av startreostaten användas (se fig. C). Diagrammet visar: regleringsresistans RB i magnetiseringskretsen; urladdningsmotstånd Rp ansluten parallellt med excitationsspolen LM; ett bromsmotstånd RT anslutet parallellt med ankaret M när det är frånkopplat från nätet och ett startmotstånd RP anslutet i serie till ankarkretsen under startperioden. För att producera maximalt flöde vid uppstart slås LM-fältspolen i utgångsläget på med full spänning.
När SB2-knappen trycks in ansluts motorns ankare från linjekontaktorn KM i serie till nätverket med motståndet RP Startstyrreläet SC fungerar som en funktion av ankarströmmen. När strömmen ökar manipulerar slutkontakten hos KA resistansen RB, vilket ökar det magnetiska excitationsflödet, och när strömmen minskar öppnas kontakten av KA och LM-spolen kopplas i serie med resistansen hos reostaten RB, p.g.a. vilket den magnetiska strömmen minskar.
När motorn startas slår den ökade startarmaturströmmen på KA-reläet och LM-spolen skapar maximalt flöde. När en viss hastighet uppnås slås accelerationskontaktorn K på, startmotståndet RP kortsluts, varefter motorn fungerar enligt sina naturliga egenskaper. När ankarströmmen minskar (som ett resultat av motoracceleration) innan KA-reläet aktiveras, öppnas KA-kontakten i magnetiseringskretsen.
LM-lindningen kommer att slås på i serie med RB-resistansen, vilket gör att fältflödet försvagas och ankarströmmen ökar i enlighet därmed. KA-reläet kommer att fungera igen, vilket ökar flödet och ökar samtidigt motorhastigheten. Under uppstart triggas rymdskeppsreläet flera gånger tills motorn når den hastighet som ställts in av RB-styrreostaten. En sådan vibrationsanordning som fungerar som en strömfunktion förenklar kretsen jämfört med styrkretsar som en funktion av tiden.
När motorn slås på genom att trycka på SB1-knappen slås ankaret på från öppningskontakten KM till bromsmotståndet RT och dynamisk bromsning utförs automatiskt. I början av stoppet försvagas magnetfältet något på grund av öppningen av KM-kontakten på reglaget för den reglerande reostaten, och excitationsströmmen passerar genom hela motståndet RB. När motorvarvtalet minskar ytterligare, kopplas accelerationskontaktorn K ur och flödet ökar när magnetiseringsspolen slås på till full nätspänning genom öppningskontakten K, vilket resulterar i en ökning av bromsmomentet.