Noder för automatiska styrkretsar som en funktion av tiden
 Elektromagnetiska, elektroniska, motoriska och elektropneumatiska används ofta i automationskretsar. tidsrelä... De vanligaste omvandlingsschemana för signalvaraktighet visas i fig. 1. Diagram fig. 1, och ger en puls av en viss varaktighet, oberoende av pressningens varaktighet knappar SB. Efter att ha tryckt på knappen SB aktiveras relä K, vilket ger en impuls att slå på mekanismen. Pulsens varaktighet bestäms av KT-reläets tidsfördröjning. SB-knappen kan ersättas med ett KQ-kommandorelä.
Elektromagnetiska, elektroniska, motoriska och elektropneumatiska används ofta i automationskretsar. tidsrelä... De vanligaste omvandlingsschemana för signalvaraktighet visas i fig. 1. Diagram fig. 1, och ger en puls av en viss varaktighet, oberoende av pressningens varaktighet knappar SB. Efter att ha tryckt på knappen SB aktiveras relä K, vilket ger en impuls att slå på mekanismen. Pulsens varaktighet bestäms av KT-reläets tidsfördröjning. SB-knappen kan ersättas med ett KQ-kommandorelä.
Diagram Fig. 8, b (med elektromagnetiskt tidsrelä) och fig. 1, c (med elektropneumatiskt eller motoriserat tidsrelä) används för att ge en kortvarig puls efter start av rörelseomkopplaren SQ. I dessa och efterföljande system, istället för kontakter rörelseomkopplare KQ reläkontakter kan användas.
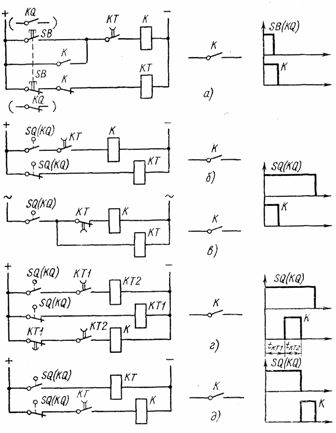
Ris. 1. Kretsar för omvandling av signalernas varaktighet
Schema fig.Id tillhandahåller en puls med varaktigheten tKT2 med en tidsfördröjning tKT1 efter starten av verkan av omkopplaren SQ.
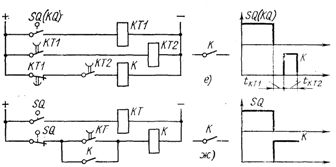
Kretsnoden Fig. 1, e. Om en tidsfördröjning tKT1 krävs innan denna puls appliceras, kan kretsen i fig. 1, e. Pulslängden är tKT2.
I positionskontrollkretsar är kretsen i fig. 1g, som utför funktionen att utfärda ett långt kommando efter slutet av anslaget på utlösningsbrytaren SQ. Kommandot avbryts vid början av en ny åtgärd på SQ-omkopplaren.
En kort tidsfördröjning (upp till 1,5 s) kan erhållas genom att slå på och av på konventionellt sätt mellanreläer på grund av shuntningen av deras spolar med kondensatorer eller dioder.
I diagrammet i fig. 2, och när kontakten KQ är sluten, aktiveras reläet K med en tidsfördröjning som bestäms av laddningstiden för kondensatorn C. När KQ är sluten återgår även reläet K med en fördröjning på grund av urladdningen av kondensatorn.

Ris. 2. Erhålla tidsfördröjningar genom att shunta spolarna i mellanreläer med kondensatorer eller dioder
För att få en tidsfördröjning endast när reläet är på, använd kretsen i Fig. 2, b. Fördröjningen när reläet är avstängt är praktiskt taget frånvarande, eftersom kondensatorn snabbt laddas ur till motståndet R (motståndets R resistans är betydligt mindre än resistansen hos reläspolen K). Ett liknande problem löses av kretsen i fig. 2c, som använder en öppningskontakt för KQ-reläet. Nackdelen med denna krets är den betydande förlusten av energi genom motståndet i frånvaro av en signal.
Schemat i fig. 2d, där när kontakten KQ öppnas, stängs reläet K av med en tidsfördröjning som styrs av motståndet R.
Enligt diagrammet i fig. 2, e skapas en tidsfördröjning när K är avstängd efter att kontakten till kommandoreläet KQ är sluten.
Om en liten fördröjning i återgången av relä K krävs när kommandoreläet KQ är aktiverat, visas diagrammet i fig. 2, e, där reläets K spole shuntas av en diod.
Schemat för att generera pulser med en given varaktighet och arbetscykel visas i fig. 3, a. Pulsens varaktighet bestäms av tidsfördröjningen för KT2-reläet, pausen bestäms av fördröjningstiden för KT1-reläet.
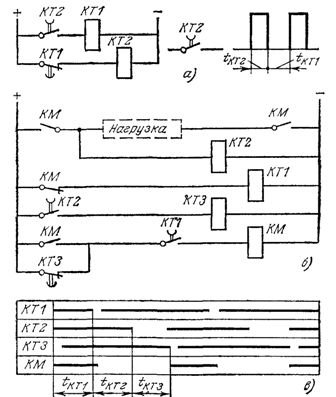
Ris. 3. Reläkretsar för generering av pulser
I fig. I figur 3, b ges ett diagram över den periodiska tillkopplingen av mekanismen med en förlängd paustid Kontaktorns KM tillslagstid är lika med tidsfördröjningen för reläet KT1, varaktigheten av pausen är summan av fördröjningarna av reläet KT2 och KTZ. Tidsdiagrammet visas i fig. 3, c.
Schema för pulsgeneratorer av tidsreläer eller logiska element (se nedan) används också för att reglera drifthastigheten för linjära mekanismer. Temperaturregulatorn blev också utbredd och innehöll en KEP-12U kommandoenhet, som på många sätt liknar ett motortidrelä. Enheten har en verkställande motor, variabla växlar, kamtrumma, brytare och 12 kontakter.
Hastighetsregulatorer använder vanligtvis schemat för cyklisk drift av KEP-12U-enheten (Fig. 4, a). Kretsen är gjord med hjälp av reläerna K1 och K2 och kontakterna på kommandoanordningen KT.1 och KT.2, vars kretsschema visas i fig. 4, b.
Slå på S-brytaren innan arbetet påbörjas.När KQ-reläkontakten kort sluts, vilket ger ett kommando att starta arbetscykeln, är K1-reläet strömsatt och självlåsande. Relä K2 aktiveras genom att manöverdonet KT slås på. Motorlindningarna LM1 och LM2 aktiveras och kamtrumman börjar rotera. Utgångskontakterna på enheten KT.3, KT.4, etc., som stänger sekventiellt, vid de inställda tidpunkterna (se diagrammet i Fig. 4, b) ger kommandon för att slå på de linjära mekanismerna. I mitten av cykeln öppnas kontakt KT.1 och relä K1 stängs av.
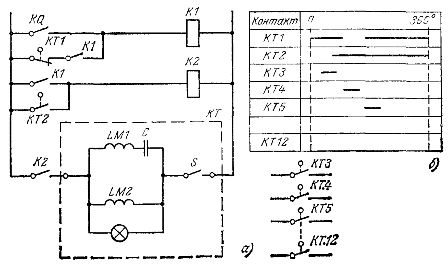
Figur 4. Linjehastighetsregulator med KEP-12U-enheten
Reläspolen K2 stödjer strömförsörjningen genom kontakten på enheten KT.2. Efter att ha roterat trumman i en vinkel på 360 ° öppnas kontakten KT.2, motorn på KEP-12U-enheten stannar. Kedjan är redo för nästa cykel.
Sammanfattningsvis kommer vi att överväga två scheman för fjärrkontroll av fördröjningen av elektromagnetiska tidsreläer.
För att ändra fördröjningen från manöverpanelen kan man använda en tvåspolad reläkrets med triggerspolar KT.1 och returspolar KT. 2 (avmagnetisering), vars MDS är riktad motsatt (fig. 5, a). Frigöringsspolens MDS justeras med hjälp av RP-potentiometern. För att undvika upprepad drift av CT:n efter att magnetiseringsomkastningen har återställts och utlösts, måste utlösningsspolens MDS vara mindre än MDS som är tillräcklig för att dra ankaret, eller så måste dess egen relästängningskontakt införas i kretsspolen (Fig. 5, a).
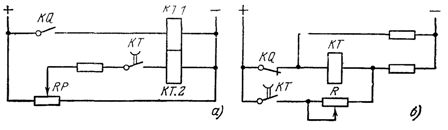
Figur 5. Schema för fjärrjustering av tidsreläfördröjningen
Enligt diagrammet i fig.5, b gör en fjärrändring i tidsfördröjningen för ett enspolsrelä. När kontakten KQ öppnar flyter reläspolen KT runt med en avmagnetiseringsström som regleras av motståndet R. När avmagnetiseringsströmmen ökar minskar reläets fördröjning och vice versa. Med en matningsspänning på 220 V används ett relä med en spole för en nominell spänning på 110 V.