Automatiska styrkretsar för start och stopp av DC-motorer
 Starten av vilken motor som helst åtföljs av vissa omkopplare i kraftkretsen och styrkretsen. I detta fall används reläkontaktor och beröringsfria enheter. För DC-motorer att begränsa startströmmar startmotstånd ingår i motorernas rotor- och ankarkrets, som stängs av när motorerna accelereras i steg. När uppstarten är klar förbikopplas startmotstånden helt.
Starten av vilken motor som helst åtföljs av vissa omkopplare i kraftkretsen och styrkretsen. I detta fall används reläkontaktor och beröringsfria enheter. För DC-motorer att begränsa startströmmar startmotstånd ingår i motorernas rotor- och ankarkrets, som stängs av när motorerna accelereras i steg. När uppstarten är klar förbikopplas startmotstånden helt.
Motorernas bromsning kan också automatiseras. Efter stoppkommandot, med hjälp av relä-kontaktorutrustningen, görs de nödvändiga omkopplarna i kraftkretsarna. När man närmar sig en hastighet nära noll kopplas motorn från nätverket. Under uppstart stängs stegen av med jämna mellanrum eller beroende på andra parametrar. Detta ändrar motorns ström och hastighet.
Motorns startkontroll utförs som en funktion av EMF (eller hastighet), ström, tid och väg.
Typiska underenheter och kretsar för automatisk styrning av startande DC-motorer
Start av en likströmsmotor med parallell eller oberoende magnetisering görs med ett motstånd infört i ankarkretsen. Ett motstånd krävs för att begränsa startströmmen. När motorn accelererar, stegras startmotståndet. När starten är klar kommer motståndet att förbigås helt och motorn kommer att återgå till sina naturliga mekaniska egenskaper (fig. 1). Vid start accelererar motorn enligt artificiell egenskap 1, sedan 2, och efter manövrering av motståndet - enligt naturlig egenskap 3.
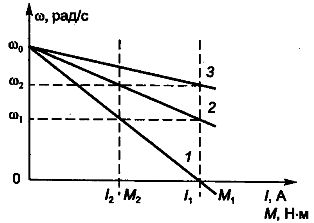
Ris. 1. Mekaniska och elektromekaniska egenskaper hos en likströmsmotor med parallell excitation (ω — rotationsvinkelhastighet; I1 M1 — toppström och motorns vridmoment; I2 M2 — ström och kopplingsmoment)
Betrakta startkretsnoden för DC-motorn (DCM) i EMF-funktionen (Fig. 2).
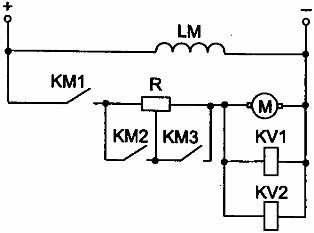
Ris. 2. Startkretsnoden för DCT för parallell excitation i EMF-funktionen
EMF (eller hastighet) funktionen styrs av reläer, spänningar och kontaktorer. Spänningsreläer är konfigurerade att arbeta vid olika ankar-emk-värden. När kontaktorn KM1 är påslagen räcker inte spänningen på KV-reläet vid starttillfället för drift. När motorn accelererar (på grund av ökningen av motorns emk) aktiveras KV1-reläet, sedan KV2 (reläaktiveringsspänningarna har motsvarande värden); de inkluderar accelerationskontaktorerna KM2, KMZ, och motstånden i ankarkretsen är shuntade (kontaktoromkopplingskretsar visas inte i diagrammet; LM är excitationslindningen).
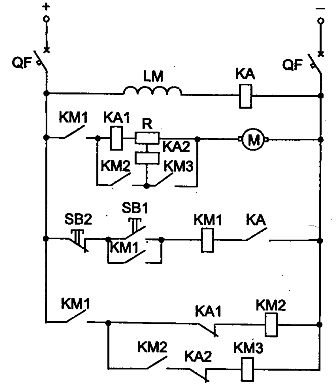
Låt oss titta på schemat för att starta en DC-motor i EMF-funktionen (Fig. 3). Motorns vinkelhastighet är ofta fixerad indirekt, d.v.s.mäta kvantiteter relaterade till hastighet. För en DC-motor är ett sådant värde EMF. Starten genomförs enligt följande. QF-strömbrytaren slås på, motorfältet är anslutet till strömförsörjningen. KA-reläet aktiveras och sluter sin kontakt.
De återstående enheterna i kretsen förblir i sin ursprungliga position. För att starta motorn måste du tryck på knappen SB1 «Start», varefter kontaktor KM1 aktiveras och ansluter motorn till strömkällan. Kontaktor KM1 är självförsörjande. DC-motorn accelereras med motorankarkretsmotstånd R.
När motorns hastighet ökar ökar dess emk och spänningen i spolarna på reläerna KV1 och KV2. Vid hastighet ω1 (se fig. 1.) aktiveras relä KV1. Den sluter sin kontakt i kontaktorkretsen KM2, som löser ut och kortsluter startmotståndets första steg med sin kontakt. Vid hastighet ω2 är reläet KV2 spänningssatt. Med sin kontakt stänger den matningskretsen till KMZ-kontaktorn, som, när den aktiveras, med en kontakt, kortsluter startmotståndets andra startsteg. Motorn når sina naturliga mekaniska egenskaper och avslutar start.
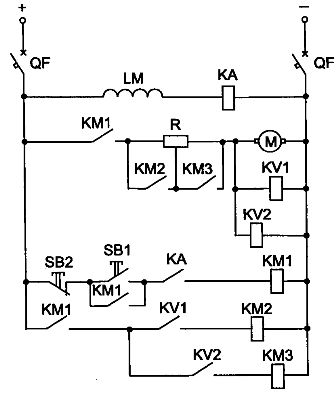
Ris. 3. Schematisk start av DCT av parallell excitation i EMF-funktionen
För korrekt funktion av kretsen är det nödvändigt att ställa in spänningsreläet KV1 att arbeta vid EMF motsvarande hastigheten ω1 och reläet KV2 att arbeta med hastigheten ω2.
För att stoppa motorn, tryck på stoppknappen SB2. För att koppla bort den elektriska kretsen, öppna QF-strömbrytaren.
Strömfunktionen styrs av ett strömrelä. Betrakta likströmsmotorns startkretsnod i flödesfunktionen. I diagrammet som visas i fig.4 används överströmsreläer, som tar upp vid startströmmen I1 och faller ut vid minimiströmmen I2 (se fig. 1). Den interna svarstiden för de aktuella reläerna måste vara mindre än kontaktorns svarstid.
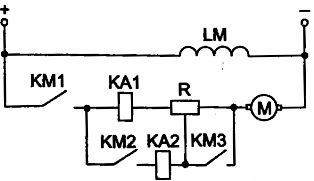
Ris. 4. Startkretsnoden för den parallella exciterings-DCT beroende på strömmen
Motoraccelerationen börjar med att motståndet är helt infört i ankarkretsen. När motorn accelererar minskar strömmen, med ström I2 försvinner reläet KA1 och med sin kontakt stänger matningskretsen för kontaktorn KM2, som förbikopplar startmotståndets första kontakt med sin kontakt. På samma sätt kortsluts motståndets andra startsteg (relä KA2, kontaktor KMZ). Kontaktorns strömkretsar visas inte i diagrammet. I slutet av start av motorn kommer motståndet i ankarkretsen att överbryggas.
Betrakta kretsen för att starta en DC-motor som en flödesfunktion (fig. 5). Motståndsstegens resistanser väljs så att i det ögonblick då motorn slås på och stegen shuntas, överskrider inte strömmen I1 i ankarkretsen och ögonblicket M1 den tillåtna nivån.
Starta en DC-motor utförs genom att slå på QF-strömbrytaren och trycka på «Start»-knappen SB1. I detta fall aktiveras kontaktorn KM1 och stänger sina kontakter. Startströmmen I1 passerar genom motorns kraftkrets, under vilken inverkan överströmsreläet KA1 aktiveras. Dess kontakt öppnar och kontaktorn KM2 får inte ström.
Ris. 5. Schematisk parallellexcitering DCT-start som funktion av ström
När strömmen faller till minimivärdet I2 faller överströmsreläet KA1 och sluter sin kontakt.Kontaktorn KM2 aktiveras och genom sin huvudkontakt shuntar den första sektionen av startmotståndet och reläet KA1. Vid omkoppling stiger strömmen till värdet I1.
När strömmen ökar igen till värdet av I1, slås inte kontaktorn KM1 på, eftersom dess spole förbikopplas av kontakten KM2. Under påverkan av strömmen I1 aktiveras reläet KA2 och öppnar sin kontakt. När i accelerationsprocessen sjunker strömmen igen till värdet I2, reläet KA2 faller och kontaktorn KMZ slås på. Starten är klar, motorn arbetar med sina naturliga mekaniska egenskaper.
För att kretsen ska fungera korrekt är det nödvändigt att svarstiden för reläet KA1 och KA2 är mindre än kontaktorernas svarstid. För att stoppa motorn, tryck på «Stopp»-knappen SB2 och stäng av QF-strömbrytaren för att koppla bort kretsen.
Tidsstyrning åstadkommes med hjälp av ett tidsrelä och motsvarande kontaktorer som kortsluter motståndsstegen med sina kontakter.
Betrakta startkretsnoden DC-motor som en funktion av tiden (Fig. 6) Tidsreläet KT aktiveras omedelbart när spänning uppstår i styrkretsen genom öppningskontakten KM1. Efter att kontakten KM1 har öppnats tappar tidsreläet KT sin strömförsörjning och sluter sin kontakt med en tidsfördröjning. Kontaktor KM2 efter ett tidsintervall som är lika med tidsreläets tidsfördröjning får ström, sluter sin kontakt och shuntar motståndet i ankarkretsen.
Ris. 6. DCT-startkretsens nod för parallell excitation som en funktion av tiden
Fördelarna med kontroll i funktionen av tid inkluderar enkel kontroll, stabilitet i accelerations- och retardationsprocessen, avsaknad av fördröjning av den elektriska drivningen vid mellanhastigheter.
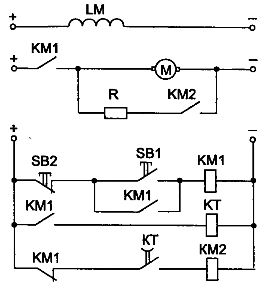
Betrakta kretsen för att starta en likströmsmotor parallell excitation som en funktion av tiden. I fig. 7 visar ett diagram över en irreversibel start DC parallell excitationsmotor. Lanseringen sker i två steg. Kretsen använder knapparna SB1 «Start» och SB2 «Stopp», kontaktorer KM1 ... KMZ, elektromagnetiska tidsreläer KT1, KT2. QF-brytaren slås på. I detta fall får spolen på tidsreläet KT1 ström och öppnar sin kontakt i kontaktorns KM2 krets. Motorn startas genom att trycka på «Start»-knappen SB1. Kontaktor KM1 får ström och ansluter med sin huvudkontakt motorn till en strömkälla med ett motstånd i ankarkretsen.
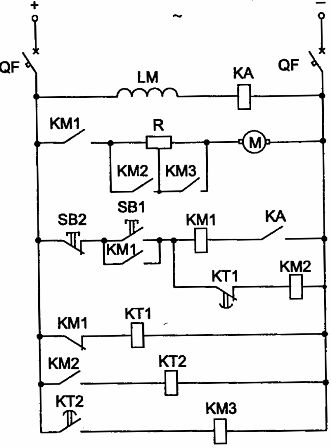
Ris. 7. Schematisk beskrivning av irreversibel start av en likströmsmotor som funktion av tiden
Underströmsreläet KA tjänar till att skydda motorn från avbrott i magnetiseringskretsen. Under normal drift aktiveras KA-reläet och dess kontakt i KM1-kontaktorkretsen sluter, vilket förbereder KM1-kontaktorn för drift. När magnetiseringskretsen bryts stängs KA-reläet av, öppnar sin kontakt, sedan stängs KM1-kontaktorn av och motorn stannar. När kontaktorn KM1 aktiveras sluter dess spärrkontakt och kontakten KM1 i reläkretsen KT1 öppnas, vilket stänger av och stänger sin kontakt med en tidsfördröjning.
Efter ett tidsintervall lika med tidsfördröjningen för reläet KT1, stängs matningskretsen för accelerationskontaktorn KM2, som utlöses och med sin huvudkontakt kortsluter ett steg i startmotståndet. Samtidigt dras tidsreläet KT2. Motorn accelererar. Efter ett tidsintervall som är lika med KT2-reläets fördröjning stänger KT2-kontakten, KMZ-accelerationskontaktorn aktiveras och med sin huvudkontakt kontaktar det andra steget av startmotståndet i ankarkretsen. Starten är klar och motorn återgår till sina naturliga mekaniska egenskaper.
Typiska DC-bromsstyrkretsenheter
DC-motorns automatiska styrsystem använder dynamisk bromsning, motsatt bromsning och regenerativ bromsning.
Vid dynamisk bromsning är det nödvändigt att stänga motorns ankarlindning till ett extra motstånd och lämna excitationslindningen aktiverad. Denna inbromsning kan göras som en funktion av hastighet och som en funktion av tid.
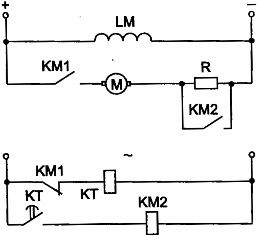
Styrning som en funktion av hastighet (EMF) under dynamisk bromsning kan göras enligt schemat som visas i fig. 8. När KM1-kontaktorn är avstängd är motorankaret frånkopplat från elnätet, men det finns spänning på dess plintar vid frånkopplingsögonblicket. Spänningsreläet KV arbetar och stänger sin kontakt i kontaktorns krets KM2, som med sin kontakt stänger motorns ankare till motståndet R.
Vid hastigheter nära noll tappar KV-reläet effekt. Ytterligare retardation från minimihastighet till helt stopp sker under inverkan av ett statiskt motståndsmoment.För att öka bromseffektiviteten kan två eller tre steg av bromsning användas.
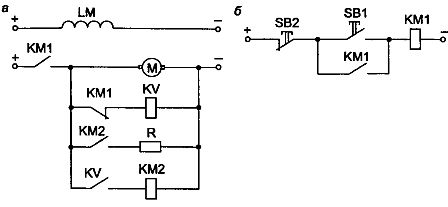
Ris. 8. Nod för kretsen för automatisk styrning av dynamisk bromsning i EMF-funktionen: a — Kraftkrets. b — styrkrets
Dynamisk bromskonstant motoroberoende excitering som funktion av tiden utförs enligt schemat som visas i fig. nio.
Ris. 9. Nod för DCT:s dynamiska bromskrets med oberoende magnetisering som en funktion av tiden
När motorn är igång är tidsreläet KT på, men kretsen för bromskontaktorn KM2 är öppen. För att stoppa måste du trycka på "Stopp"-knappen SB2. Kontaktor KM1 och tidrelä KT förlorar ström; kontaktorn KM2 aktiveras eftersom kontakten KM1 i kontaktorns krets KM2 sluter och kontakten på tidreläet KT öppnar med en tidsfördröjning.
För timing av tidsreläet får kontaktorn KM2 ström, stänger sin kontakt och ansluter motorankaret till det extra motståndet R. Ett dynamiskt stopp av motorn utförs. Vid slutet öppnar KT-reläet efter en tid sin kontakt och kopplar bort KM2-kontaktorn från nätverket. Ytterligare inbromsning till helt stopp utförs under påverkan av motståndsmomentet Ms.
Vid omvänd bromsning fungerar motorns EMF och nätspänningen i enlighet med detta. För att begränsa strömmen sätts ett motstånd in i kretsen.
Magnetstyrning av DC-motorer
Motorns fältlindning har en betydande induktans och om motorn stängs av snabbt kan en stor spänning uppstå på den, vilket gör att lindningens isolering går sönder. För att förhindra detta kan du använda kretsnoderna som visas i fig.10. Släckmotståndet slås på parallellt med excitationsspolen genom dioden (fig. 10, b). Därför, efter avstängning, passerar strömmen genom motståndet under en kort tid (bild 10, a).

Ris. 10. Noder för kretsar för att slå på släckningsresistanser: a — Släckningsresistansen är parallellkopplad. b — släckningsresistansen slås på genom dioden.
Skydd mot avbrott av exciteringskretsen utförs med hjälp av ett underströmsrelä enligt schemat som visas i fig. elva.

Ris. 11. Skydd mot avbrott i exciteringskretsen: a — Power exciteringskrets. b — styrkrets
Vid avbrott i magnetiseringsspolen kopplar reläet KA från och kopplar från kontaktorns KM krets.