Elektrisk vagndrift med traverser
En vagn med traverskran är ett oberoende element i en lyftanordning och är utformad för att flytta laster inom traversens räckvidd med en tekniskt bestämd rörelsehastighet och den nödvändiga noggrannheten för att placera lasten. Boggidrivningen är en av huvudkomponenterna i traversutrustning.
Vagnen rör sig på spåret av en travers. Bron själv rör sig i en riktning som är vinkelrät mot vagnens rörelseriktning. En lyftmekanism är installerad på vagnen, som är utrustad med en krok (eller elektromagnet) med vilken du kan flytta lasten. Boggins rörelse är en integrerad del av den tekniska cykeln för traverskranen (Fig. 1).
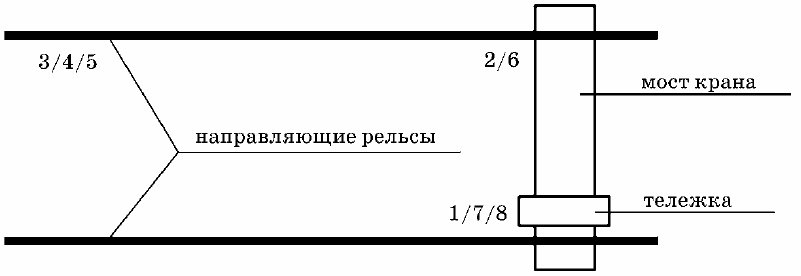
Ris. 1. Schema för att utföra operationer med en brokran i en arbetscykel
Denna cykel består av följande operationer (i figur 1 visas operationsnummer i siffror):
1 — lyfta lasten;
2 — flytta vagnen till en given position;
3 — flytta kranen till en förutbestämd position;
4 — Minska vikten av bördan.
5 — lyfta kroken med lastens vikt;
6 — flytta kranen till sitt ursprungliga läge;
7 — flytta vagnen till dess ursprungliga position;
8 — sänkning av kroken.
Som framgår av traverskranens processcykel slås vagnens drivmotor på i den andra och sjunde operationen. När boggin närmar sig en given position på avståndet från traverskranen, bromsas boggidrivningens elmotor elektriskt för att säkerställa den nödvändiga bromsnoggrannheten.
Motorn stängs sedan av och en mekanisk broms ansätts. Dessutom slås den elektriska drivningen av brorörelsen på och lasten rör sig längs verkstaden enligt den tekniska uppgiften. När den når den angivna platsen stannar kranen, lasten sänks och sedan utförs de nödvändiga tekniska operationerna.

Det kinematiska diagrammet för vagnens rörelsemekanism med traverser visas i figur 2. Vagnens rörelsemekanism är gjord enligt schemat med en växellåda i mitten mellan drivhjulen.
Drivningen från elmotorn D genom bromsskivan T, växellådan P, kopplingarna M och axlarna B överförs till löphjulen. En bromsskiva används för att hålla vagnen stillastående.
Vagnen har fyra åkhjul och två drivhjul. Körhjulen på kranvagnar är vanligtvis gjorda med två ribbor.
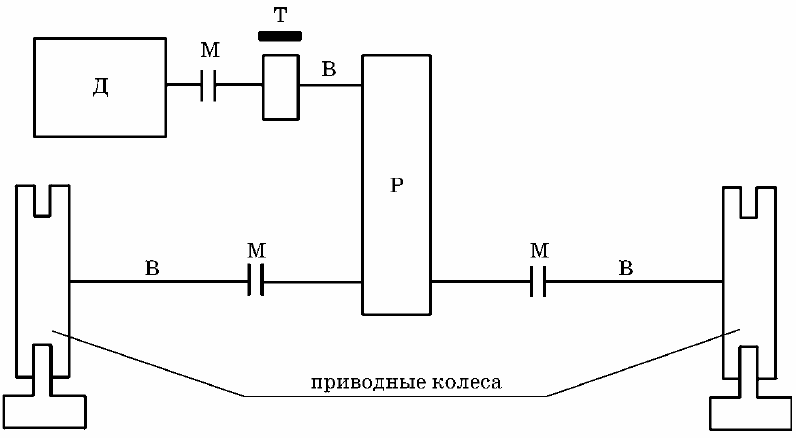
Ris. 2. Kinematisk bild av vagnens rörelsemekanism
Tiden för att flytta vagnen till den angivna positionen kommer att bestämmas genom att ta hänsyn till tiden för att accelerera och bromsa vagnen med den nödvändiga accelerationen.Baserat på villkoren för den tekniska processen, bör färdskrivaren när du flyttar vagnen ha den form som visas i figur 3.
Det är nödvändigt att säkerställa en mjuk start av boggimekanismen till en given hastighet med den nödvändiga accelerationen. För att säkerställa den nödvändiga positioneringsnoggrannheten krävs en mjuk retardation av den elektriska drivningen med övergång till reducerad hastighet, varefter vagnen stannar.
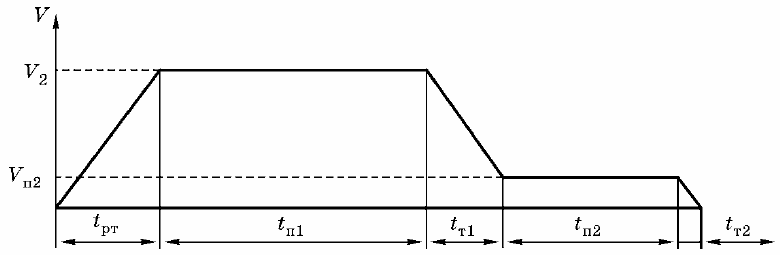
Ris. 3. Färdvärde för vagnens rörelsemekanism
Boggins rörelse med stötar på metallstrukturen i rälslederna, intensiv acceleration och inbromsning, naturliga vibrationer i metallstrukturen när maskinerna är belastade orsakar mycket intensiva mekaniska stötar på den elektriska utrustningen som finns på brokranboggin. Baserat på detta måste den elektriska drivningen för att flytta vagnen uppfylla följande krav:
1) den elektriska drivningen måste ge möjligheten att starta mekanismen i rörelse, vända rörelseriktningen och stoppa mekanismen med erforderlig acceleration (m / s2) och korrekt positioneringsnoggrannhet (mm);
2) den elektriska drivningen måste ge jämn hastighetskontroll ner från elnätet;
3) det utvecklade motorvridmomentet måste säkerställa att mekanismen fungerar vid en given intensitet;
4) vid ett givet antal motorstarter per timme bör det inte finnas någon överhettning av dess lindningar, på grund av vilket ett förlängt stopp av mekanismen är möjligt;
5) motorn måste väljas i enlighet med driftsförhållandena, det vill säga den måste ha en lämplig design, och dess lindningar måste vara värmebeständiga och ha isolering mot fukt;
6) drivmotorn måste ha de minsta svänghjulsmassorna som har en betydande inverkan på flödet av transienter under frekventa drivstarter;
7) drivmotorn måste matcha drivmekanismens kraft och ha den nödvändiga överbelastningskapaciteten;
8) den elektriska drivenheten måste säkerställa bildandet av transienta processer med minsta varaktighet;
9) säkerhet och enkel underhåll måste beaktas vid utformningen av den elektriska drivenheten.

Det statiska momentet för rörelsemekanismer som arbetar på en horisontell spårlinje i en produktionsanläggning skapas av glidande friktionskrafter i lagren och rullande friktion hos boggihjulen som rullar på traversens räls. Mekanismens statiska moment under vagnens framåtrörelse bestäms av kranens lyftkapacitet. Mekanismens statiska moment under boggins omvända rörelse beräknas för en ofullständig belastning.
För elektrisk drivning av traversvagnar, asynkrona ekorrburrotormotorer (inkl. som en del av en frekvensomformare), lindade rotorinduktionsmotorer och oberoende exciterade DC-motorer.