Stängda automatiska styrsystem
 Slutna automatiska styrsystem (ACS) skiljer sig från öppna kretsar i den utrustning som används och i automatiseringens fullständighet. Med ACS öppen får huvudenheten (inklusive styrutrustningen) ingen information om det faktiska driftläget för den elektriska installationen (drivmotor, körmaskin).
Slutna automatiska styrsystem (ACS) skiljer sig från öppna kretsar i den utrustning som används och i automatiseringens fullständighet. Med ACS öppen får huvudenheten (inklusive styrutrustningen) ingen information om det faktiska driftläget för den elektriska installationen (drivmotor, körmaskin).
I en stängd ASUB sänds information till styrelementen, vilket åtföljs av inlämnande av lämpliga kommandosignaler. Kretsen som sänder sådan information stänger styrslingan och bildar en sluten ACS eller återkopplings-ACS.
Skillnaden mellan stängd och öppen ACS kan förklaras med exemplet att styra hastigheten på en elmotor i ett generator-motorsystem (G-D). Med ACS öppen (Fig. 1, a) ställs elmotorns inställda varvtal in manuellt av potentiometer P. Hastighetsjusteringen utförs visuellt av en varvräknare, som drivs av TG-varvräknaren. Varje hastighetsavvikelse från börvärdet elimineras av operatören genom att påverka potentiometerns skjutreglage.
I en sluten ACS (Fig.1, b) ankaret på TG-tachogeneratorn ingår i exciteringskretsen för OVG-generatorn, vilket skapar ett slutet eller återkopplingssystem (i detta fall med hastighetsåterkoppling).
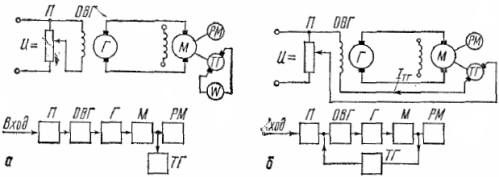
Ris. 1. Styrkrets för elektrisk motor i G -M-systemet: a — öppen ACS, b — stängd ACS
Strömmen som genereras av tachogeneratorn (Aztg) i en sluten krets riktad mot potentiometerns ström (Azn) och den resulterande strömmen verkar i kretsen lika med den geometriska skillnaden för dessa strömmar. Med hjälp av reglaget på potentiometern ställer operatören in värdet på den resulterande strömmen i excitationsspolen på OVG, med vilken motsvarande hastighet för elmotorn tillhandahålls. Det är här operatörens roll slutar. I framtiden bibehåller systemet automatiskt det inställda driftsättet för den elektriska enheten med en viss noggrannhet.
Antag att elmotorns hastighet har minskat till följd av belastningsspiken jämfört med den angivna. Hastighetsminskningen åtföljs av en motsvarande minskning av hastigheten på tachogeneratorn och spänningen vid dess terminaler. Detta kommer i sin tur att leda till en minskning av strömmen Aztg i återkopplingskretsen, och i en viss position av reglaget på potentiometern - en ökning av den resulterande strömmen i generatorns excitationslindning. Generatorspänningen och motorhastigheten kommer att öka i enlighet med detta.
Processen att öka hastigheten och spänningen kommer att fortsätta tills strömmen i återkopplingsslingan når det inställda värdet och motorhastigheten når det inställda värdet.
Vid analys av automatiska styrsystem, funktionsdiagram… I fig.2 överföringar funktionsschema för ACS, som inkluderar följande element:
1 — huvudenhet som ställer in driftsätt, ger ett kommando, startpuls eller signal,
2 — jämförelsemoment. Den inkluderar signalen X1 från mastern, signalen X0, som bestämmer hastigheten eller nivån för det kontrollerade värdet. Med hänsyn till signalen från det nionde huvudåterkopplingselementet, jämför element 2 de mottagna signalerna och skickar den ytterligare korrigerade signalen X2,
3 — det transformerande elementet, signalen op omvandlar det till en annan form, bekvämare för vidare överföring. Exempelvis tillförs signalen X2 i form av hydrauliskt (pneumatiskt, mekaniskt) tryck Element 3 omvandlar det till en elektrisk ström. Eftersom denna typ av omvandling kan kräva ytterligare energi, är element 3 kopplat till en PE-energikälla,
4 — lägga till element, det tar emot två signaler: X3 och X8 från korrigeringselementet (minneselement) 8. Dessa signaler summeras av element 4 och skickas till nästa element,
5 — förstärkningselement, insignalen X1 kan vara svag och måste förstärkas för efterföljande överföring. Detta görs genom element 5 som är anslutet till PE-strömkällan,
6 — exekutivt element, exekverar den mottagna signalen (elmotor, elektromagnetiskt relä, servomotor),
7 — justerbart föremål eller arbetsmaskin.
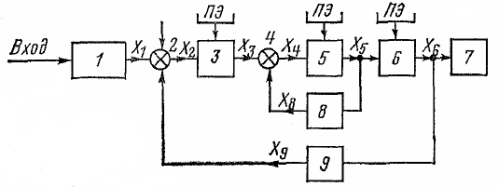
Ris. 2. Funktionsdiagram av ACS
Varje automationselement är en energiomvandlare, vid vars ingång värdet X' appliceras och värdet X tas bort från utgången. «För varje element i ett stationärt tillstånd finns det ett visst beroende X» (X'), som kallas en statisk egenskap.
Ett stängt automatiskt styrsystem kännetecknas av närvaron av återkoppling; den har åtminstone en återkopplingsslinga som ansluter systemets utgång till dess ingång. Dessutom kan det finnas så kallad intern återkoppling, som ansluter utgången och ingången för individuella ACS-element.
Feedback är uppdelat i hård och flexibel. Hårda begränsningar fungerar både i transienta och stationära driftlägen av systemet, flexibelt - endast i transienta. Gör skillnad på positiv och negativ feedback. När det reglerade värdet ökar, ökar den positiva anslutningen den ännu mer, och den negativa, tvärtom, minskar. Återkopplingar kan överföra signaler proportionella mot rotationsvinkel, hastighet, spänning, ström, etc. och kallas vinkel, hastighet, spänning, strömåterkopplingar i enlighet därmed. För mer information se här: Delar av automationssystem
Enligt funktionsprincipen kan ACS delas in i tre grupper:
-
kontinuerlig drift där förhållandet mellan de kontrollerade och inställda värdena inte bryts,
-
impulsverkan, där kopplingen mellan de kontrollerade och de inställda värdena sker med jämna mellanrum,
-
reläaktion där kommunikation endast sker när ett värde når ett visst värde.
Beroende på den lag enligt vilken ett givet värde förändras över tiden, kan ACS också delas in i tre grupper:
-
konstant eller lågt börvärdessystem där det automatiskt styrda värdet hålls konstant. Dessa är stabiliseringssystem, som i huvudsak är automatiska styrsystem (ACS),
-
system där målvärdet ändras enligt ett specifikt, förutbestämt program. Det är ett mjukvaruhanteringssystem,
-
system där ett givet värde kan variera kraftigt och enligt en godtycklig lag, d.v.s. spårningssystem.