Potentiometriska sensorer
En potentiometersensor är ett variabelt motstånd till vilket en matningsspänning appliceras, dess ingångsvärde är den linjära eller vinkelförskjutningen av den strömsamlande kontakten, och utgångsvärdet är den spänning som tas av denna kontakt, som ändras i storlek som dess position ändringar.
Potentiometriska sensorer är utformade för att omvandla linjära eller vinkelförskjutningar till en elektrisk signal, samt att återskapa de enklaste funktionella beroenden i automatiska och automatiska enheter av en kontinuerlig typ.
 Potentiometrisk sensorkopplingsschema
Potentiometrisk sensorkopplingsschema
Genom motstånd delas potentiometriska sensorer in i
-
lameller med konstant motstånd;
-
trådspole med kontinuerlig lindning;
-
med ett resistivt lager.

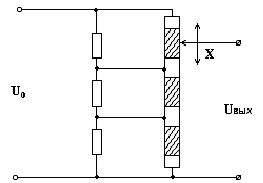
Lamellära potentiometriska sensorer användes för att utföra relativt grova mätningar på grund av vissa designfel.
I sådana sensorer löds konstanta motstånd, valda nominellt på ett speciellt sätt, till lamellerna.
Lamellen är en struktur med alternerande ledande och icke-ledande element på vilka kollektorkontakten glider.När strömavtagaren flyttas från ett ledande element till ett annat, ändras den totala resistansen hos motstånden som är anslutna till den med ett belopp som motsvarar det nominella värdet av ett motstånd. Resistansförändringen kan ske över ett brett intervall. Mätfelet bestäms av storleken på kontaktdynorna.
Lamellpotentiometersensor
Trådpotentiometersensorer är designade för mer exakta mätningar. Som regel är deras design en ram gjord av getinax, textolit eller keramik, på vilken en tunn tråd är lindad i ett lager, vänder sig i en varv, på vars rengjorda yta en strömavtagare glider.
Trådens diameter avgör noggrannhetsklass potentiometersensor (hög är 0,03-0,1 mm, låg är 0,1-0,4 mm). Trådmaterial: manganin, fechral, legeringar baserade på ädelmetaller. Släpringen är gjord av ett mjukare material för att förhindra att tråden skaver.
Fördelarna med potentiometersensorer:
-
enkel design;
-
liten storlek och vikt;
-
hög grad av linjäritet av statiska egenskaper;
-
egenskapernas stabilitet;
-
möjlighet till drift på växelström och likström.
Nackdelar med potentiometersensorer:
-
närvaron av en glidkontakt, vilket kan orsaka skada på grund av oxidation av kontaktspåret, gnidning av varv eller böjning av glidaren;
-
fel i drift på grund av belastning;
-
relativt liten omvandlingsfaktor;
-
hög känslighetströskel;
-
förekomsten av buller;
-
mottaglighet för elektrisk erosion under påverkan av impulsurladdningar.

Statisk karaktäristik för potentiometriska sensorer
Statisk karaktäristik för en irreversibel potentiometrisk sensor
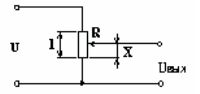
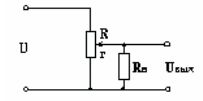
Låt oss betrakta som ett exempel en potentiometersensor med en kontinuerlig spole. En AC- eller DC-spänning U appliceras på potentiometerns plintar. Ingångsvärdet är förskjutningen X, utgångsvärdet är spänningen Uout. För viloläge är sensorns statiska karakteristik linjär eftersom förhållandet är sant: Uout = (U / R) r,
där R är spolresistansen; r är motståndet för en del av spolen.
Med tanke på att r / R = x / l, där l är spolens totala längd, får vi Uout = (U / l) x = Kx [V / m],
där K är omvandlingskoefficienten (överförings) för sensorn.
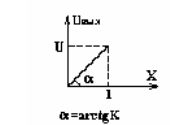
Uppenbarligen kommer en sådan sensor inte att reagera på en förändring i tecknet för ingångssignalen (sensorn är irreversibel). Det finns system som är känsliga för ändringar i signaturer. Den statiska karaktäristiken för en sådan sensor har den form som visas i figuren.
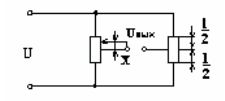
Reversibel krets för en potentiometersensor
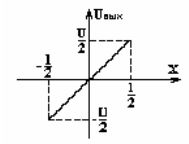
Statisk karaktäristik för en reversibel potentiometrisk sensor
De resulterande ideala egenskaperna kan skilja sig avsevärt från de verkliga på grund av förekomsten av olika typer av fel:
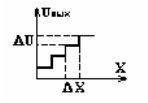
1. Död zon.
Utspänningen varierar diskret från varv till varv, d.v.s. denna zon uppstår när, för ett litet ingångsvärde, Uout inte ändras.
Storleken på spänningshoppet bestäms av formeln: DU = U / W, där W är antalet varv.
Känslighetströskeln bestäms av spoltrådens diameter: Dx = l / W.
Potentiometrisk sensor för dödband
2. Oregelbundenhet i statiska egenskaper på grund av variation i tråddiameter, motstånd och lindningsstigning.
3. Ett fel från glapp som uppstod mellan motorns rotationsaxel och styrhylsan (tryckfjädrar används för att minska det).
4.Fel på grund av friktion.
Vid låg effekt hos elementet som driver borsten på potentiometersensorn kan en stagnationszon uppstå på grund av friktion.
Borsttrycket måste justeras noggrant.
5. Fel på grund av lastpåverkan.
Beroende på belastningens karaktär uppstår ett fel, både i statiskt och dynamiskt läge. Med en aktiv belastning ändras den statiska karakteristiken. Utspänningsvärdet kommer att bestämmas enligt uttrycket: Uout = (UrRn) / (RRn + Rr-r2)
Dessa. Uout = f (r) beror på Rn. Med Rn >> R kan det visas att Uout = (U / R) r;
när Rn är ungefär lika med R, är beroendet icke-linjärt och det maximala felet för sensorn blir när skjutreglaget avviker från (2/3))l. Välj vanligtvis Rн / R = 10 … 100. Storleken på felet vid x = (2/3) l kan bestämmas av uttrycket: E = 4/27η, där η= Rн / R — lastfaktor.
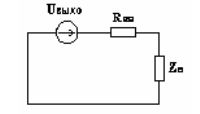
Potentiometrisk sensor under belastning
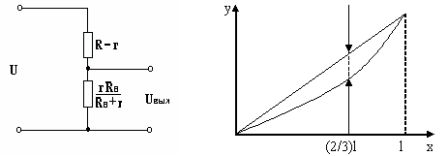 a — Ekvivalent krets för en potentiometrisk sensor med en belastning, b — Inverkan av belastningen på den statiska karakteristiken för den potentiometriska sensorn.
a — Ekvivalent krets för en potentiometrisk sensor med en belastning, b — Inverkan av belastningen på den statiska karakteristiken för den potentiometriska sensorn.
Dynamiska egenskaper hos potentiometriska sensorer
Transmissionsfunktion
För att härleda överföringsfunktionen är det bekvämare att ta belastningsströmmen som utgångsvärde; den kan bestämmas med hjälp av ekvivalentgeneratorsatsen. B = Uout0 / (Rvn + Zn)
Tänk på två fall:
1. Lasten är rent aktiv Zn = Rn eftersom Uout0 = K1x In = K1x / (Rin + Rn)
där K1 är sensorns tomgångsvarvtal.
Genom att tillämpa Laplace-transformen får vi överföringsfunktionen W (p) = In (p) / X (p) = K1 / (Rin + Rn) = K
På så sätt fick vi en tröghetslös anslutning, vilket gör att sensorn har alla frekvens- och tidsegenskaper som motsvarar denna anslutning.
Ekvivalent krets
2. Induktiv last med en aktiv komponent.
U = RvnIn + L (dIn / dt) + RnIn
Genom att tillämpa Laplace-transformen får vi Uoutx (p) = In (p) [(Rvn + pL) + Rn]
Genom transformationer kan man komma fram till en överföringsfunktion av formen W (p) = K / (Tp + 1) — en aperiodisk koppling av första ordningen,
där K = K1 / (Rvn + Rn)
T = L/(Rvn + Rn);
Internt brus från potentiometersensorn
 Som visas, när borsten rör sig från varv till varv, ändras utspänningen abrupt. Felet som skapas genom stegning är i form av en sågtandsspänning överlagd på överföringsfunktionens utspänning, dvs. är buller. Om borsten vibrerar skapar rörelsen även brus (störningar). Frekvensspektrumet för vibrationsbrus ligger inom ljudfrekvensområdet.
Som visas, när borsten rör sig från varv till varv, ändras utspänningen abrupt. Felet som skapas genom stegning är i form av en sågtandsspänning överlagd på överföringsfunktionens utspänning, dvs. är buller. Om borsten vibrerar skapar rörelsen även brus (störningar). Frekvensspektrumet för vibrationsbrus ligger inom ljudfrekvensområdet.
För att eliminera vibrationer är strömavtagare gjorda av flera kablar av olika längd hopvikta. Då kommer den naturliga frekvensen för varje tråd att vara annorlunda, detta förhindrar uppkomsten av teknisk resonans. Nivån på termiskt buller är låg, de beaktas i särskilt känsliga system.
Funktionella potentiometriska sensorer
Det bör noteras att inom automation används ofta funktionella överföringsfunktioner för att erhålla olinjära beroenden. De är konstruerade på tre sätt:
-
ändra diametern på tråden längs spolen;
-
ändring av spolens stigning;
-
användningen av en ram med en viss konfiguration;
-
genom att manövrera sektionerna av linjära potentiometrar med resistanser av olika storlekar.
Till exempel, för att erhålla ett kvadratiskt beroende enligt den tredje metoden, är det nödvändigt att ändra ramens bredd linjärt, som visas i figuren.
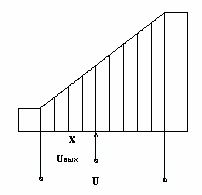
Funktionell potentiometersensor
Multi-varv potentiometer
Konventionella potentiometersensorer har ett begränsat arbetsområde. Dess värde bestäms av ramens geometriska dimensioner och antalet spolvarv. De kan inte öka i det oändliga. Därför har flervarvspotentiometersensorer funnit tillämpning, där ett resistivt element vrids i en spirallinje med flera varv, deras axel måste roteras flera gånger så att motorn rör sig från ena änden av spolen till den andra, d.v.s. den elektriska räckvidden för sådana sensorer är en multipel av 3600.
Den största fördelen med multi-turn potentiometrar är deras höga upplösning och noggrannhet, vilket uppnås på grund av den stora längden på det resistiva elementet med små totala dimensioner.
Fotopotentiometrar
Fotopotentiometer — är en beröringsfri analog till en konventionell potentiometer med ett resistivt lager, den mekaniska kontakten i den ersätts av en fotokonduktiv, vilket naturligtvis ökar tillförlitligheten och livslängden. Signalen från fotopotentiometern styrs av en ljussond som fungerar som en skjutreglage. Den bildas av en speciell optisk anordning och kan förskjutas som ett resultat av yttre mekanisk verkan längs det fotoledande skiktet. Vid den punkt där fotoskiktet exponeras uppstår överskott (jämfört med mörkt) fotokonduktivitet och en elektrisk kontakt skapas.
Fotopotentiometrar är uppdelade efter syfte i linjära och funktionella.
Funktionella fotopotentiometrar gör att ljuskällans rumsliga rörelse kan omvandlas till en elektrisk signal med en given funktionell form på grund av det profilerade resistiva lagret (hyperboliskt, exponentiellt, logaritmiskt).