Klassificering av automatiska styrsystem

Uppsättningen av automatisk kontrollenhet och kontrollobjekt som är anslutna och interagerar med varandra i enlighet med kontrollalgoritmen kallas automatiskt kontrollsystem (ACS).
Automatiska styrsystem kan klassificeras enligt styrmetod och funktionella egenskaper. Enligt styrmetoden är alla system indelade i två stora klasser: vanliga (icke-självreglerande) och självreglerande (adaptiva).
Vanliga system som tillhör den enkla kategorin ändrar inte sin struktur under förvaltningen. De är de mest utvecklade och allmänt använda i gjuterier och termiska verkstäder. Vanliga automatiska styrsystem är indelade i tre underklasser: öppna, slutna och kombinerade styrsystem.
Automatiska styrsystem med öppen slinga är i sin tur indelade i automatiska stela styrsystem (SZHU) och störningskontrollsystem.
I de första systemen verkar regulatorn på styrobjektet oavsett det erhållna resultatet, det vill säga värdet på den styrda variabeln och den externa störningen. Störningskontrollsystem arbetar utifrån principen att styråtgärden genereras beroende på de externa störningar som påverkar styrobjektet.
Som ett exempel, betrakta värmesystemet i ett gjuteri eller termisk verkstad. I detta fall beror förbrukningen av varmvatten i butikens värmerör på de yttre väderförhållandena. Ju kallare det är ute, desto mer varmvatten tillförs radiatorerna och vice versa.
Slutna automatiska styrsystem som arbetar enligt avböjningsprincipen kallas också automatiska styrsystem (ACS). Deras utmärkande särdrag är närvaron av en sluten cykel av signalpassage, d.v.s. närvaron av en returkanal genom vilken information om tillståndet för den styrda variabeln sänds till ingången på jämförelseelementet.
Automatiska styrsystem är utformade för att lösa tre problem: stabilisering av det kontrollerade värdet (stabiliserande ATS), ändring av det kontrollerade värdet enligt kända (programmerade ATS) eller okända (följande ATS) program.
Vid ATS-stabilisering är börvärdet för den styrda variabeln konstant. Ett exempel på ett sådant system är temperaturkontrollsystemet i arbetsutrymmet i en termisk ugn. I mjukvara ATS ändras värdet på den styrda variabeln över tiden enligt ett förutdesignat (känt) program.
I servosystem ändras inställningsvärdet för den styrda variabeln över tiden enligt ett tidigare okänt program.Spårnings- och mjukvaru-ATS skiljer sig från stabilisatorer i principen att behandla referenssignalen.
Det mest typiska exemplet på servostyrning är det automatiska upprätthållandet av ett givet förhållande mellan förbrukningen av bränsle och luft vid reglering av förbränningsprocessen i ugnar för smältning och uppvärmning av bränsle.
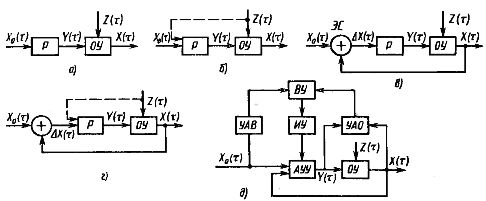
Automatiska styrsystem: a — öppen, b — förspänning öppen, c — stängd, d — kombinerad, d — självreglerande, P — styrenhet, OU — styrobjekt, ES — jämförelseelement, UAV — anordning för analys av kontrollåtgärden : VU — datorenhet, IU är exekutiv enhet, AUU är automatisk kontrollenhet, AUO är kontrollobjektanalysenhet.
Kombinerade system kombinerar fördelarna med avvikelse- och störningskontrollsystem, vilket ökar regleringens noggrannhet. Effekten av oredovisade störningar i kombinerade system kompenseras eller dämpas av förspänningskontroll.
Självreglerande (adaptiva) system kan delas in i tre underklasser: extrema system, självjusterande system och självjusterande system.
Extrema regleringssystem kallas stabiliserande, spårande eller programmerade styrsystem där inställningen, programmet eller reproduktionslagen automatiskt ändras beroende på förändringar i yttre förhållanden eller systemets interna tillstånd för att skapa det mest gynnsamma (optimala) driftsättet för ett kontrollobjekt.
I sådana system, istället för en permanent inställning eller ett program, installeras en automatisk sökanordning, som analyserar varje egenskap hos objektet (effektivitet, produktivitet, ekonomi, etc.) och, beroende på det erhållna resultatet, tillhandahåller det erforderliga värdet av en styrd variabel till styranordningen, så att denna egenskap har ett enastående värde med en kontinuerlig förändring av olika störande influenser som påverkar systemets driftsförhållanden.
I system med självinställningsparametrar, när de yttre förhållandena eller egenskaperna hos det kontrollerade objektet ändras, sker en automatisk (inte enligt ett förutbestämt program) ändring av styrenhetens variabla parametrar för att säkerställa stabil drift av systemet och upprätthålla det kontrollerade värdet på en given eller optimal nivå.
I system med en självjusterande struktur, när de yttre förhållandena och egenskaperna hos kontrollobjektet ändras, växlas elementen i anslutningsschemat eller nya element introduceras i det. Syftet med dessa förändringar (val) av strukturen är att uppnå en bättre lösning på ledningsproblemet.
Valet av strukturen görs genom automatisk sökning med hjälp av beräknings- och logiska operationer. Sådana system måste inte bara anpassa sig till alla förändringar i yttre förhållanden och egenskaper hos föremålet, utan också fungera normalt även i närvaro av funktionsfel eller skador på enskilda element, vilket skapar nya kretsar för att ersätta de trasiga. Självreglerande system kan göras för att förbättras, "skaffa erfarenhet" genom att snabbt prova flera alternativ, välja och "komma ihåg" det bästa.
Funktionsklassificering alla automatiska styrsystem är indelade i fyra klasser:
-
system för att samordna mekanismernas arbete,
-
system för att reglera parametrarna för tekniska processer,
-
automatiska styrsystem,
-
automatiska skydds- och blockeringssystem.

System utformade för att koordinera driften av enskilda mekanismer i anläggningen eller anläggningen som helhet automatiska stela styrsystem (SZHU).
Automatiska styrsystem (ACS) tekniska processer säkerställer att det kontrollerade värdet upprätthålls på en given nivå eller dess förändring enligt ett givet program.
Automatiska styrsystem (ACS) innehåller medel och metoder för att få information om de aktuella värdena för tekniska processparametrar (temperatur, tryck, dammighet eller gasinnehåll i luften, etc.) utan direkt mänsklig inblandning.
Automatiska skyddssystem (SAZ) och blockeringssystem (SAB) förhindrar uppkomsten av nödsituationer när utrustningen används i ett stabilt tillstånd.