Proceduren för att förbereda och kompilera program för programmerbara styrenheter
Utrustningskontrollfunktioner bestäms av processteknik och organisation. Därför är de i allmänhet ganska specifika och individuella för varje enhet eller plats. Men när problemet med att utveckla effektiv, mobil och flexibel mjukvara för automationssystem ställs och löses, representeras komplexa kontrollfunktioner vanligtvis som en uppsättning enkla elementära åtgärder som "aktivera", "avaktivera", "implementeringsfördröjning" etc. .
Från dessa positioner kan de flesta av kontrollfunktionerna villkorligt reduceras till två, vilket är ganska vanligt för alla uppgifter - logiska och reglerande. Den förra är känd som den allmänna tidsåtgärdsalgoritmen och den senare är känd som tidsparametern. Den mest allmänna presentationen av sådana typiska funktioner för styrning av teknisk utrustning visas i fig. 1, a och b.
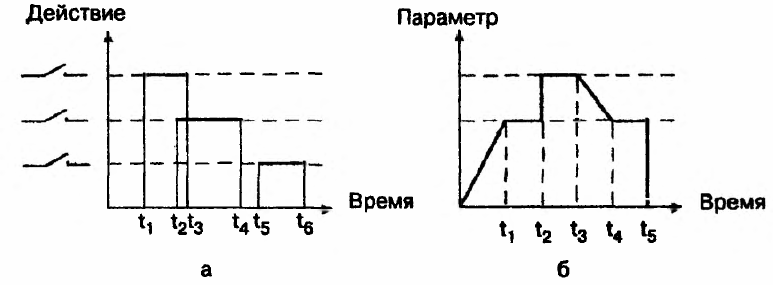
Ris. 1. Typiska styrfunktioner för processutrustning
Baserat på analysen av de kvantitativa egenskaperna hos de implementerade styrfunktionerna i varje specifikt exempel på teknisk utrustning kan tekniska krav formuleras till en programmerbar logisk styrenhet (PLC) som styrmedel vad gäller noggrannhet, hastighet, antalet parallella uppgifter att lösa, mängden minne, sammansättningen av kringutrustning, dialogverktyg m.m.
IEC 61131-3-standarden beskriver 5 programmeringsspråk som är resultatet av forskningen av de mest framgångsrika egenutvecklade utvecklingarna av världsledare på PLC-marknaden:
-
språket för reläkontaktkretsar (RKS) eller ladderdiagram LD (ladder diagram),
-
funktionsblockdiagram (FBD) språk, FBD (funktionsblockschema),
-
IL (instruktionslista) språk — typisk assembler med ackumulator- och etikettövergångar,
-
ST-språket (Structured Text) är ett textspråk på hög nivå,
-
SFC-diagram (Sequential Function Chart). SFC har sitt ursprung till Petri-nät.
PLC-språk är mycket originella och skiljer sig avsevärt från välkända datorprogrammeringsspråk.
Standarden ålägger inte PLC-utvecklare att implementera alla programmeringsspråk. Vanligtvis implementerar små PLC-tillverkare flera eller ett enda språk. På många sätt beror prioriteringen av att använda ett visst programmeringsspråk på de historiskt etablerade traditionerna inom branschen eller tillämpningsområdet.
Standardiseringen av programmeringsspråk och PLC-modellen ledde till framväxten av specialiserade företag som är engagerade i designen av programmeringssystem för PLC: er, som ger övergången från ett programmeringsspråk till ett maskinspråk på olika nivåer:
-
när du går in i ett program;
-
vid rendering;
-
när du ändrar eller flyttar ett separat kommando- eller programområde;
-
när syntaxfel upptäcks och signalerar till operatören.
För att utföra dessa uppgifter kan programmeringssystemet framgångsrikt arbeta i lokalt läge, det vill säga oberoende av styrenheten. Detta ger programmeraren möjlighet att skriva ett program från vilken lämplig plats som helst, och inte i en produktionsverkstad, det vill säga i en miljö som är mer gynnsam för den kreativa processen. Möjligheten att modellera underlättar avsevärt processen att felsöka programmet och förbättrar organisationen av arbetet.

Huvudstegen för förberedelse och programmering för programmerbara styrenheter är följande:
1. Bestäm vad det styrda systemet (styrobjektet) ska göra, styrmålen och andra tilläggsfunktioner som utförs av styrsystemet, sekvensen av operationer som utförs av ställdonen med avseende på tid och tillståndet hos sensorerna och styranordningarna.
2. Komponera programmets algoritm i grafisk form.
3. Bestäm vilka moduler som behövs för att ansluta sensorer, styrenheter, ställdon, larm och annan utrustning som behövs för att hantera platsen.
När du väljer moduler, analysera parametrarna för ingångs-/utgångssignalerna (spännings- och strömnivåer) och modulernas funktionalitet. Var uppmärksam på möjligheten att använda smarta moduler, som kan utföra förbearbetning av insignaler och vissa lokala kontrollfunktioner, vilket avsevärt kommer att minska komplexiteten i programmeringen.
4.Gör ett diagram eller en tabell för att ansluta alla in- och utgångsenheter för styrobjektet och utrustningen som används i styrprocessen till styrenhetsmodulerna.
5. Skriv ett program i ett av PLC-programmeringsspråken som utför en viss sekvens av operationer, deras sammankoppling och utvecklar möjliga nödsituationer.
6. Kontrollera programmet för syntaxfel och korrigera dem, och sedan efter körtidsfel och gör även lämpliga korrigeringar.
7. Skriv programmet och alla nödvändiga driftsparametrar till regulatorn.
8. Efter att styrsystemet är färdigmonterat kontrollerar du programmet i själva styrprocessen och gör vid behov mer exakta inställningar.
9. Spara två kopior av det senaste programmet och lagra dem på separata platser.