Växelströms elektriska maskiner
Elektriska maskiner används för att omvandla mekanisk energi till elektrisk energi (AC- och DC-generatorer) och vice versa (elektriska motorer).
I alla dessa fall används i huvudsak tre huvudupptäckter inom området elektromagnetism: fenomenet mekanisk interaktion av strömmar som upptäcktes av Ampere 1821, fenomenet elektromagnetisk induktion som upptäcktes av Faraday 1831, och den teoretiska sammanfattningen av dessa fenomen gjord av Lenz (1834) i sin välkända lag om den inducerade strömmens riktning (i själva verket förutspådde Lenz lag lagen om bevarande av energi för elektromagnetiska processer).

För att omvandla mekanisk energi till elektrisk energi eller vice versa, är det nödvändigt att skapa en relativ rörelse av en ledande krets med en ström och ett magnetfält (magnet eller ström).
I elektriska maskiner konstruerade för kontinuerlig drift används den roterande rörelsen hos den rörliga delen av maskinen (växelströmsmaskinens rotor) placerad inuti den stationära delen (statorn).Maskinens spole som tjänar till att skapa magnetfältet kallas induktorn, och spolen som flyter runt med driftsström kallas ankaret. Båda dessa senare termer används också för DC-maskiner.
För att öka den magnetiska induktionen placeras maskinlindningar på ferromagnetiska kroppar (stål, gjutjärn).
Alla elektriska maskiner har egenskapen reversibilitet, det vill säga de kan användas både som generatorer av elektrisk energi och som elektriska motorer.

Asynkrona motorer
Asynkronmotorer används en av manifestationerna av elektromagnetisk induktion… I fysikkurser demonstreras det enligt följande:
Under en kopparskiva, som kan rotera kring en vertikal axel som passerar genom dess centrum, placeras en vertikal hästskomagnet som drivs att rotera kring samma axel (den mekaniska interaktionen mellan skivan och magneten är utesluten). I det här fallet börjar skivan att rotera i samma riktning som magneten, men med lägre hastighet. Om du ökar den mekaniska belastningen på skivan (till exempel genom att öka friktionen av axeln mot axiallagret), minskar dess rotationshastighet.
Den fysiska innebörden av detta fenomen kan lätt förklaras av teorin om elektromagnetisk induktion: när magneten roterar skapas ett roterande magnetfält, vilket inducerar virvelströmmar i skivan, storleken på den senare beror, allt annat lika, på fältets och skivans relativa hastighet.
Enligt Lenz lag måste skivan rotera i fältets riktning. I frånvaro av friktion måste skivan få en vinkelhastighet som är lika med magnetens hastighet, varefter den inducerade emk kommer att försvinna. I verkliga livet är friktion oundvikligen närvarande och skivan blir långsammare.Dess storlek beror på det mekaniska bromsmomentet som skivan upplever.
Diskrepansen mellan rotationshastigheten för skivan (rotorn) och rotationshastigheten för magnetfältet återspeglas i motorernas namn.
Funktionsprincipen för asynkronmotorer:
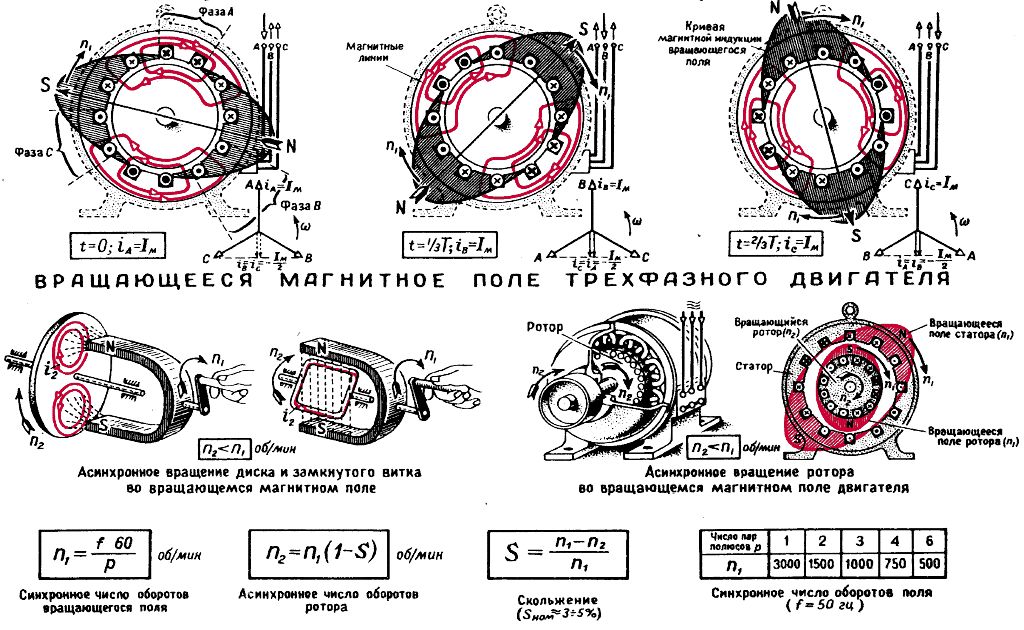
I tekniska asynkronmotorer (oftast trefas) skapas ett roterande magnetfält flerfasströmflyter runt den stationära statorlindningen. Vid frekvensen av trefasström är och antalet statorspolar 3p roterande fält gör n = f / p varv / sek.

En roterbar rötor är placerad i statorhåligheten. En roterande mekanism kan kopplas till dess axel.I de enklaste "ekorrcell"-motorerna består rotorn av ett system av längsgående metallstänger placerade i spåren på en cylindrisk stålkropp. Ledningarna är kortslutna av två ringar. För att öka vridmomentet görs rotorns radie tillräckligt stor.
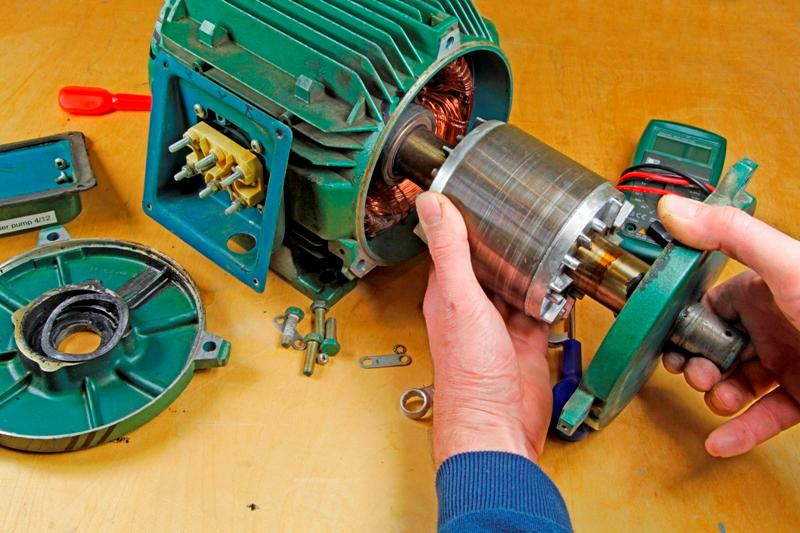
I andra motorkonstruktioner (typiskt högeffektsmotorer) bildar rotortrådarna en öppen trefaslindning. Spolarnas ändar är kortslutna i själva rotorn, och ledningarna förs ut till tre släpringar monterade på rotoraxeln och isolerade från den.
En trefasreostat är ansluten till dessa ringar med hjälp av glidkontakter (borstar), som tjänar till att starta motorn i rörelse. Efter att motorn har vridits tas reostaten bort helt och rotorn blir en ekorrbur (se — Asynkronmotorer med lindad rotor).

Det finns en plintplatta på statorhuset. Statorlindningarna förs ut till dem. De kan inkluderas stjärna eller triangel, beroende på nätspänningen: i det första fallet kan nätspänningen vara 1,73 gånger högre än i det andra.
Värdet som kännetecknar rotorns relativa retardation jämfört med induktionsmotorns statorfält kallas glida… Den ändras från 100 % (vid tidpunkten för start av motorn) till noll (idealiskt fall av förlustfri rotorrörelse).
Omkastningen av induktionsmotorns rotationsriktning uppnås genom ömsesidig omkoppling av varannan linjär ledare i det elektriska nätverket som försörjer motorn.

Ekorrburmotorer används ofta inom industrin. Fördelarna med asynkronmotorer är designens enkelhet och frånvaron av glidkontakter.
Fram till nyligen var den största nackdelen med sådana motorer svårigheten med hastighetsreglering, för om spänningen på statorkretsen ändras för detta, ändras vridmomentet kraftigt, men det var tekniskt svårt att ändra frekvensen på matningsströmmen. Moderna mikroprocessorenheter används nu i stor utsträckning för att styra frekvensen på matningsströmmen för att variera motorhastigheten — frekvensomvandlare.
Generatorer
Generatorer är byggda för betydande effekt och hög spänning. Liksom asynkrona maskiner har de två lindningar. Normalt är ankarlindningen placerad i statorhuset. Induktorerna som skapar det primära magnetiska flödet är monterade på rotorn och drivs av en exciter - en liten likströmsgenerator monterad på rotoraxeln. I kraftfulla maskiner skapas ibland excitationen av en likriktad växelspänning.
På grund av ankarlindningens orörlighet försvinner de tekniska svårigheterna i samband med användningen av glidkontakter med höga effekter.
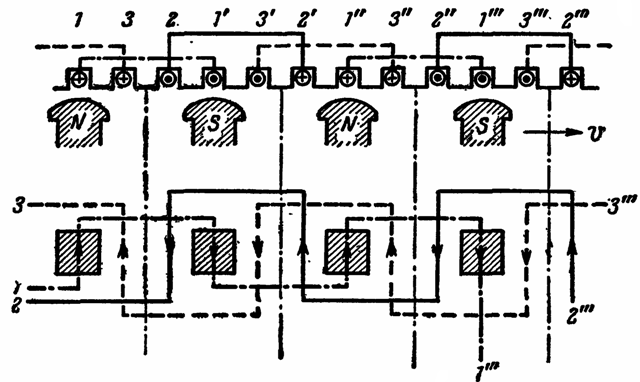
Bilden nedan visar ett schema över en enfasgenerator. Dess rotor har åtta poler. På dessa finns lindade spolar (visas inte i figuren) som matas från en extern källa av likström som appliceras på släpringar monterade på rotoraxeln. Polspolarna är lindade på ett sådant sätt att tecknen på polerna som är vända mot statorn växlar. Antalet stolpar måste vara jämnt.
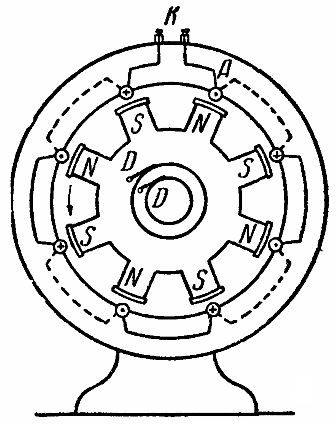
Ankarlindningen är placerad i statorhuset. Dess långa fungerande «aktiva» ledningar, vinkelräta mot ritningens plan, visas i figuren med cirklar, de korsas av linjerna för magnetisk induktion när rotorn roterar.
Cirklarna visar den momentana fördelningen av riktningarna för de inducerade elektriska fälten. Anslutningskablarna som löper längs statorns framsida visas med heldragna linjer och på baksidan med streckade linjer. K klämmor används för att ansluta en extern krets till statorlindningen. Rotorns rotationsriktning indikeras med en pil.
Om du mentalt skär maskinen längs en radie som passerar mellan klämmorna K och förvandlar den till ett plan, kommer den relativa positionen för statorlindningen och rotorpolerna (sida och plan) att avbildas med en schematisk ritning:
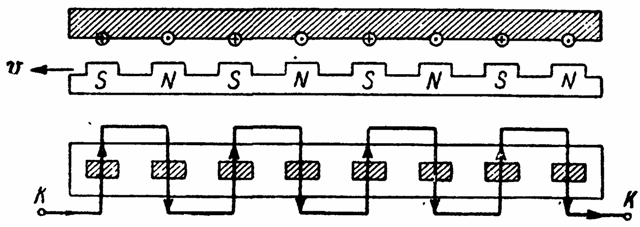
Med tanke på figuren ser vi till att alla aktiva trådar (som passerar genom induktorns poler) är anslutna till varandra i serie och EMF som induceras i dem summeras. Faserna för alla EMF är uppenbarligen desamma.Under en fullständig rotation av rotorn kommer fyra fullständiga perioder av strömändring att erhållas i var och en av ledningarna (och därför i den yttre kretsen).
Om en elektrisk maskin har två polpar och rotorn roterar med n varv per sekund, är frekvensen för växelströmmen som tas emot av maskinen f = pn hz.
Eftersom frekvensen av EMF i nätverket måste vara konstant, måste rotorernas rotationshastighet vara konstant. För att få en EMF med teknisk frekvens (50 Hz) kan en relativt långsam rotation användas om antalet rotorpoler är tillräckligt stort.
För att erhålla trefasström placeras tre separata lindningar i statorkroppen. Var och en av dem är förskjuten i förhållande till de andra två med en tredjedel av bågavståndet mellan intilliggande (motstående) poler på induktorerna.
Det är lätt att verifiera att när induktorerna roterar, induceras elektromagnetiska fält i spolarna som skiftas i fas (i tid) med 120 °. Spolarnas ändar tas bort från maskinen och kan kopplas i stjärna eller delta.
I en generator bestäms den relativa hastigheten för fältet och ledaren av rotorns diameter, antalet rotorvarv per sekund och antalet polpar.

Om generatorn drivs av en vattenström (hydrogenerator) görs den vanligtvis med långsamma varv. För att erhålla den önskade strömfrekvensen är det nödvändigt att öka antalet poler, vilket i sin tur kräver en ökning av rotorns diameter.
Av ett antal tekniska skäl kraftfulla vätgasgeneratorer de har vanligtvis en vertikal axel och är placerade ovanför hydraulturbinen, vilket får dem att rotera.

Ångturbindrivna generatorer — Turbingeneratorer har vanligtvis hög hastighet. För att minska de mekaniska krafterna har de små diametrar och ett motsvarande litet antal poler.En rad tekniska överväganden kräver tillverkning av turbingeneratorer med horisontell axel.
Om generatorn drivs av en förbränningsmotor kallas den en dieselgenerator, eftersom dieselmotorer i allmänhet används som motorer som förbrukar billigare bränsle.

Generatorreversibilitet, synkronmotorer
Om en växelspänning appliceras på generatorns statorlindning från en extern källa, kommer det att finnas en interaktion mellan induktorns poler med magnetfältet för strömmen som genereras i statorn, och vridmoment från samma riktning kommer att verka på alla stolpar.
Om rotorn roterar med en sådan hastighet att strax efter halva perioden av växelströmmen, kommer nästa pol på induktorn (motsatt i tecken till den första polen) att passa under statorlindningens avsedda ledning, då tecknet på interaktionskraften mellan den och strömmen, som har ändrat sin riktning, kommer att förbli densamma.
Under dessa förhållanden kommer rotorn, som är under kontinuerlig inverkan av vridmomentet, att fortsätta att röra sig och kommer att kunna driva vilken mekanism som helst. Att övervinna motståndet mot rotorns rörelse kommer att ske på grund av den energi som förbrukas av nätverket, och generatorn blir en elmotor.

Det bör dock noteras att kontinuerlig rörelse endast är möjlig vid en strikt definierad rotationshastighet, eftersom vid avvikelse från den kommer ett accelerationsmoment att verka delvis på var och en av rotorns poler och rör sig mellan de två ledarna i rotorn. stator, en del av tiden - stopp .
Således måste motorns rotationshastighet bestämmas strikt, — den tid under vilken polen ersätts med nästa måste sammanfalla med strömmens halva period, varför sådana motorer kallas synkront.
Om en växelspänning appliceras på statorlindningen med en stationär rötor, så, även om alla rotorns poler under den första halvcykeln av strömmen upplever verkan av vridmoment av samma tecken, fortfarande, på grund av tröghet, rotorn kommer inte att ha tid att röra sig. I nästa halvcykel kommer tecknet på vridmomenten för alla rotorpoler att ändras till det motsatta.
Som ett resultat kommer rotorn att vibrera men kommer inte att kunna rotera. Därför måste synkronmotorn först lindas upp, det vill säga bringas till det normala antalet varv, och först då ska strömmen i statorlindningen slås på.
Utvecklingen av synkronmotorer utförs med mekaniska metoder (vid låga effekter) och speciella elektriska anordningar (vid höga effekter).
För små belastningsändringar ändras motorhastigheten automatiskt för att anpassas till den nya belastningen. Så när belastningen på motoraxeln ökar saktar rotorn omedelbart ner. Därför ändras fasförskjutningen mellan linjespänningen och den motsatt inducerade EMF som induceras av induktorn i statorlindningen.
Dessutom skapar ankarreaktionen en avmagnetisering av induktorerna, så statorströmmen ökar, induktorerna upplever ökat vridmoment och motorn börjar rotera synkront igen och övervinner den ökade belastningen. En liknande process inträffar med belastningsreduktion.
Med skarpa fluktuationer i belastningen kan denna anpassningsförmåga hos motorn vara otillräcklig, dess hastighet kommer att förändras avsevärt, den kommer att "falla ur synkronism" och slutligen stanna, medan induktions-EMK som induceras i statorn försvinner och strömmen i den ökar skarpt. Därför måste skarpa fluktuationer i lasten undvikas. För att stoppa motorn måste du självklart först koppla bort statorkretsen och sedan koppla bort choken; när du startar motorn måste du följa omvänd ordningsföljd.
Synkronmotorer används oftast för att driva mekanismer som arbetar med konstant hastighet. Här är fördelarna och nackdelarna med synkronmotorer och metoderna för att starta dem: Synkronmotorer och deras tillämpningar
Pedagogisk filmremsa - "Synchronous motors", skapad av fabriken för pedagogiskt-visuella hjälpmedel 1966. Du kan se den här: Filmstrip «Synchronous Motor»
