Egenskaper för enfas induktionsmotorer
Enfas asynkronmotorer används ofta inom teknik och vardagsliv. Produktionen av enfasiga asynkrona elmotorer från en bråkdel av en watt till hundratals watt är mer än hälften av produktionen av alla lågeffektsmaskiner, och deras effekt ökar ständigt.
Enfasmotorer är generellt indelade i två kategorier:
-
motorer för allmänt bruk « som inkluderar elektriska motorer för industri och hushåll;
-
motorer för automatiska anordningar — kontrollerade och okontrollerade växelströmsmotorer och specialiserade elektriska maskiner med låg effekt (tachogeneratorer, roterande transformatorer, selsins, etc.).
En betydande del av de asynkrona elektriska motorerna är motorer för allmänna ändamål som är konstruerade för att fungera på ett enfas AC-nätverk. Det finns dock en ganska omfattande grupp av universella asynkrona elmotorer utformade för att fungera i både enfasiga och trefasiga nätverk.
Utformningen av universella motorer skiljer sig praktiskt taget inte från traditionell design av trefas asynkrona maskiner… Vid drift i ett trefasnät har dessa motorer egenskaper som liknar dem hos trefasmotorer.
Enfasmotorer har en ekorrburrotor, och statorlindningen kan tillverkas i olika versioner. Oftast placeras en arbetslindning som fyller två tredjedelar av slitsarna och en startlindning som fyller den återstående tredjedelen av slitsarna på statorn. Den löpande spolen beräknas för kontinuerlig drift och startspolen beräknas endast för startperioden. Därför är den gjord av tråd med litet tvärsnitt och innehåller ett betydande antal varv. För att skapa startmoment inkluderar startlindningen fasskiftande element - motstånd eller kondensatorer.
Asynkrona motorer med låg effekt kan vara tvåfasiga när arbetslindningen placerad på statorn har två faser blandade i rymden med 90 °. I en av faserna ingår ständigt ett fasskiftande element - en kondensator eller motstånd Top, vilket ger en viss fasförskjutning mellan spolströmmarna.
Det brukar kallas en motor med en kondensator permanent kopplad till en av faserna kondensator… Kapacitansen för den fasskiftande kondensatorn kan vara konstant, men i vissa fall kan kapacitansvärdet vara olika för uppstart och för driftläge.
En karakteristisk egenskap hos enfasiga asynkronmotorer är förmågan att rotera rotorn i olika riktningar. Rotationsriktningen bestäms av riktningen för det initiala vridmomentet.
Vid lågt rotormotstånd (Ccr < 1) kan därför en enfasmotor inte arbeta i omvänt läge. Motorläget motsvarar rotorns varv 0 <n <nc vid ett högre varvtal sker generatorläget.
En egenskap hos enfasmotorer är att dess maximala vridmoment beror på rotorns motstånd. När rotorns aktiva motstånd ökar minskar det maximala vridmomentet och med stora motståndsvärden Skr > 1 blir det negativt.
När du väljer typ av elektrisk motor för att driva en enhet eller mekanism är det nödvändigt att känna till dess egenskaper.De viktigaste är vridmomentegenskaper (initial startmoment, maximalt vridmoment, minsta vridmoment), rotationsfrekvens, vibroakustiska egenskaper. I vissa fall krävs också energi- och viktegenskaper.
Som ett exempel beräknas egenskaperna hos en enfasmotor med följande parametrar:
-
antal faser — 1;
-
nätfrekvens — 50 Hz;
-
nätspänning — 220 V;
-
aktivt motstånd för statorlindningen - 5 ohm;
-
induktivt motstånd för statorlindningen — 9,42 Ohm;
-
induktivt motstånd hos rotorlindningen - 5,6 Ohm;
-
axiell längd av maskinen - 0,1 m;
-
antalet varv i statorlindningen -320;
-
statorhålsradie — 0,0382 m;
-
antal kanaler — 48;
-
luftgap — 1,0 x 103 m.
-
rotorinduktansfaktor 1,036.
Enfaslindningen fyller två tredjedelar av statorslitsarna.
I fig. 1 visar beroenden av strömmen hos en enfas elektrisk motor och det elektromagnetiska slirvridmomentet. I det ideala viloläget har motorströmmen som förbrukas av nätverket, främst för att skapa ett magnetfält, ett relativt stort värde.
För en simulerad motor är magnituden på magnetiseringsströmmen cirka 30% av den initiala strömmen, för trefasmotorer med samma effekt - 10-15%.Det elektromagnetiska momentet i det ideala tomgångsläget har ett negativt värde, vilket ökar när rotorkretsens motstånd ökar. På glida C= 1, det elektromagnetiska momentet är noll, vilket bekräftar att modellen fungerar korrekt.
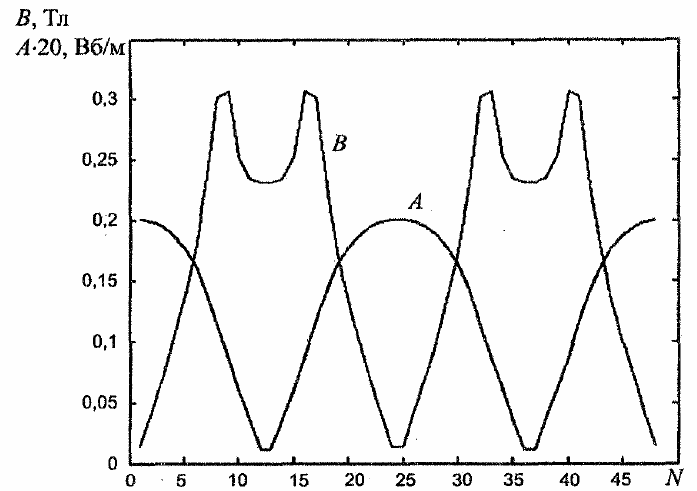
Fikon. 1. Enveloppen av vektorpotential och magnetisk induktion i motorgapet under glidning s = 1
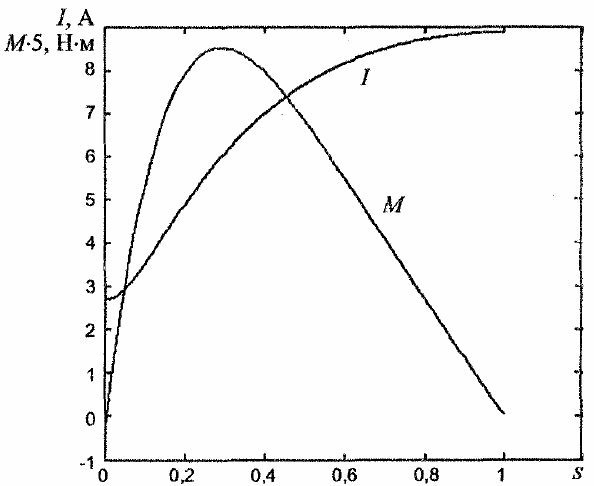
Ris. 2. Beroende av ström och elektromagnetiskt vridmoment hos en enfas asynkronmotor på slirning
Beroendet av användbar och förbrukad kraft vid slirning (fig. 3) har en traditionell karaktär. Motorns effektivitet i det ideala tomgångsläget har ett negativt tecken som motsvarar det negativa vridmomentet, och effektfaktorn i detta läge är mycket låg (0,125 för den simulerade motorn).
Det lägre värdet på effektfaktorn jämfört med trefasmotorer förklaras av magnetiseringsströmmens höga storlek. När belastningen ökar ökar värdet på effektfaktorn och blir jämförbart med trefasmotorer (fig. 4).
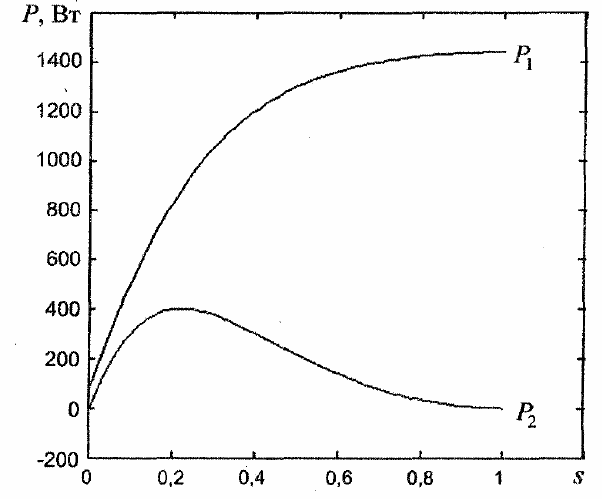
Ris. 3. Beroende av den användbara och förbrukade effekten hos en enfas asynkronmotor på slirning
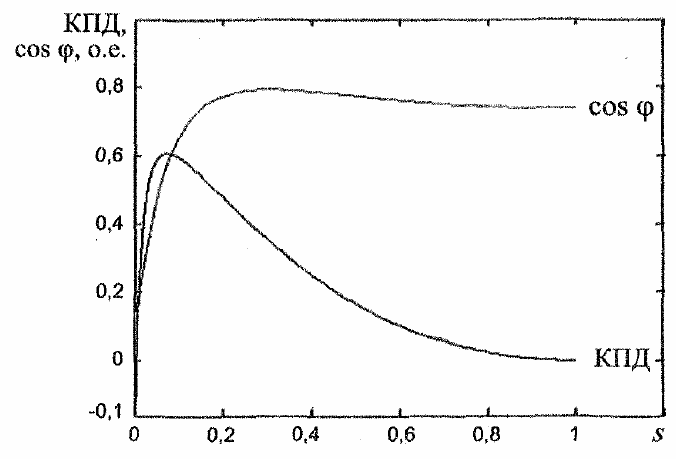
Ris. 4. Beroende av koefficienten för användbar verkan och effekt för en enfas asynkronmotor på slirning
När det aktiva motståndet hos rotorn ökar minskar det elektromagnetiska momentets storlek och vid kritiska glidningar över enhet blir det negativt.
I fig. 5 visar beroendet av det elektromagnetiska momentet hos en enfas slirmotor för olika värden på den elektriska ledningsförmågan hos motorns sekundära medium.
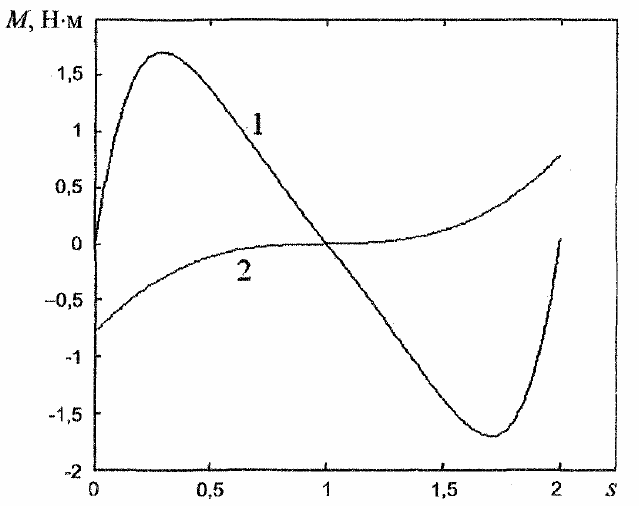
Ris. 5.Beroende av det elektromagnetiska momentet hos en enfas slirmotor vid olika rotorresistanser (1 — 17 x 106 Cm/m, 2 — 1,7 x 106 Cm/m)
Kondensatormotorer har två lindningar permanent anslutna till nätet. En av dem är ansluten direkt till nätverket, den andra är ansluten i serie med en kondensator som ger den nödvändiga fasförskjutningen.
Båda lindningarna upptar samma antal slitsar på statorn, och antalet varv och kondensatorns kapacitans beräknas på ett sådant sätt att ett cirkulärt roterande magnetfält tillhandahålls med viss glidning. Oftast accepteras den nominella lappen som sådan. I det här fallet visar sig emellertid det initiala vridmomentet vara mycket mindre än det nominella.
Magnetfältet i den initiala moden är elliptisk; påverkan av magnetfältets motgående komponenter påverkas kraftigt. Om kondensatorns kapacitans ökas genom att välja den från villkoret att erhålla ett cirkulärt fält vid uppstart, så sker en minskning av vridmomentet och en minskning av energiindikatorerna vid nominell glidning.
En tredje variant är också möjlig, när det cirkulära fältet motsvarar en glidning med en större storlek än i det nominella läget. Men denna väg är inte heller optimal, eftersom ökningen av vridmomentet åtföljs av en betydande ökning av förlusterna. En ökning av startmomentet för en kondensatormotor kan uppnås genom att öka rotorns aktiva motstånd. Denna metod leder till en ökning av förlusterna med varje slirning, vilket leder till att motorns effektivitet minskar.
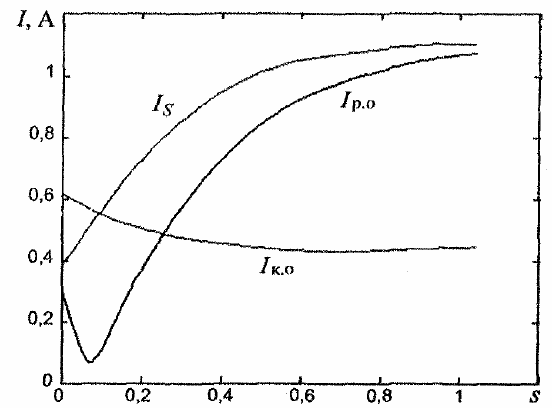
Ris. 6.Beroende av slirkondensatormotorströmmar (Azp.o — driftspoleström, Azk.o — kondensatorspoleström, E — motorström)
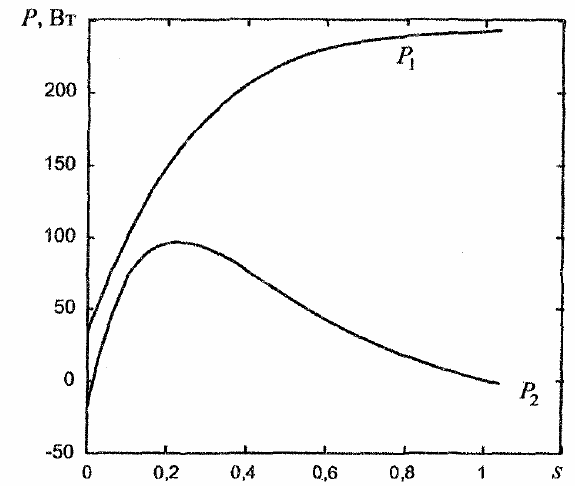
Ris. 7. Beroende på den förbrukade P1 och användbara P2-slireffekten hos en kondensator
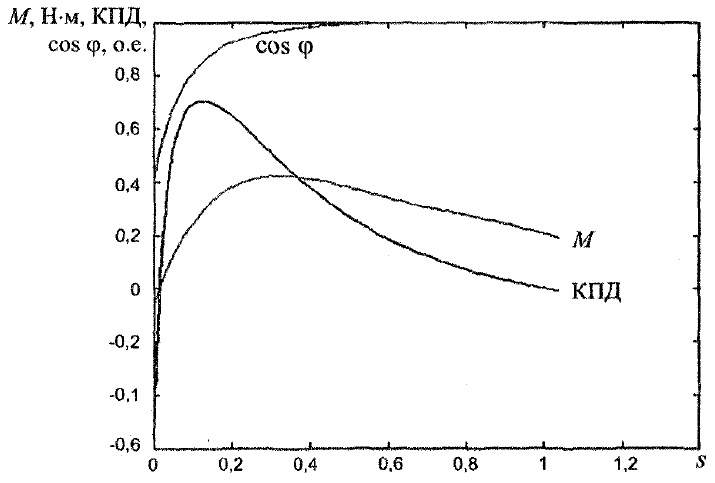
Ris. 8. Beroende av koefficienten för användbar verkan och effekt och det elektromagnetiska momentet för slirkondensatormotorn
Kondensatormotorn har ganska tillfredsställande energiprestanda, en hög effektfaktor, vars värde överstiger effektfaktorn för en trefasmotor, och med ökat rotormotstånd och betydande kapacitet, högt startmoment. Samtidigt har motorn, som nämnts ovan, ett reducerat verkningsgradsvärde.
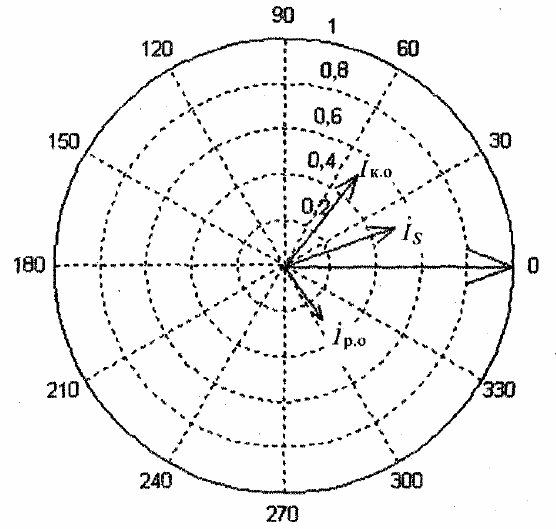
Ris. 9. Vektordiagram av en kondensatormotor vid slirning s = 0,1
Vektordiagrammet (fig. 9) visar att vid det valda värdet på kondensatorkapacitansen är kondensatorns spolström ledande i förhållande till nätverksspänningen, och arbetsspolens ström släpar efter. Diagrammet visar också att när man glider nära nominellt är motorns magnetfält elliptiskt. För att få ett cirkulärt fält måste kondensatorns kapacitansvärde reduceras så att strömmarna i de två spolarna är lika stora.
Se även om detta ämne:Flerhastighets enfas kondensatormotorer