Magnetisk upptäckt av defekter: principen för drift och tillämpning, schema och enhet för defektoskopet
Metoden för detektering av magnetiska eller magnetiska pulverdefekter används för att analysera ferromagnetiska delar med avseende på förekomsten av defekter som ytsprickor eller hålrum, såväl som främmande inneslutningar som finns nära metallytan.
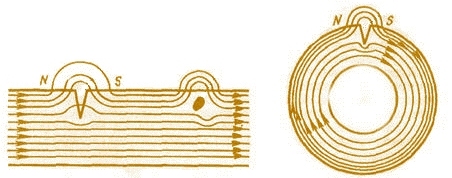
Kärnan i magnetisk detektering av defekter som en metod är att fixera det spridda magnetfältet på ytan av delen nära platsen där defekten är inuti, medan det magnetiska flödet passerar genom delen. Sedan på platsen för defekten magnetisk permeabilitet förändras plötsligt, då verkar magnetfältslinjerna böja sig runt defektplatsen och därmed ge dess position.
Ytdefekter eller defekter som ligger på ett djup av upp till 2 mm under ytan "skjuter" magnetfältslinjerna bortom ytan på delen, och ett lokalt spritt magnetfält bildas på denna plats.
Användningen av ferromagnetiskt pulver hjälper till att fixera det spridda fältet, eftersom polerna som uppträder vid kanterna av defekten attraherar dess partiklar. Den bildade fällningen har formen av en ven, många gånger större än storleken på defekten. Beroende på styrkan hos det applicerade magnetfältet, såväl som formen och storleken på defekten, bildas en viss form av fällning från dess plats.
Det magnetiska flödet som passerar genom arbetsstycket och stöter på en defekt, till exempel en spricka eller ett skal, ändrar dess storlek p.g.a. materialets magnetiska permeabilitet på denna plats visar sig vara annorlunda än i resten, därför lägger sig dammet på kanterna av det defekta området under magnetisering.
Magnetit eller järnoxid Fe2O3-pulver används som magnetiska pulver. Den första har en mörk färg och används för analys av ljusa delar, den andra har en brunröd färg och används för att upptäcka defekter på delar med mörk yta.
Pulvret är ganska fint, dess kornstorlek är från 5 till 10 mikron. En suspension baserad på fotogen eller transformatorolja, med ett förhållande på 30-50 gram pulver per 1 liter vätska, gör det möjligt att framgångsrikt genomföra magnetiska defekter.
Eftersom defekten kan lokaliseras inuti delen på olika sätt, sker magnetiseringen på olika sätt. För att tydligt identifiera en spricka placerad vinkelrätt mot arbetsstyckets yta eller i en vinkel på högst 25 °, använd polmagnetisering av delen i spolens magnetiska bälte med ström eller placera delen mellan två poler en stark permanentmagnet eller elektromagnet.
Om defekten är belägen i en skarpare vinkel mot ytan, det vill säga nästan längs den längsgående axeln, kan den tydligt identifieras genom tvärgående eller cirkulär magnetisering, där magnetfältslinjerna bildar slutna koncentriska cirklar, för detta passerar strömmen direkt genom delen eller genom en omagnetisk metallstav som sätts in i ett hål i delen som ska testas.
För att upptäcka defekter i olika riktningar används kombinerad magnetisering, där två magnetiska fält verkar samtidigt vinkelrätt: tvärs och längsgående (pol); en cirkulerande magnetiseringsström passerar också genom den del som är placerad i strömspolen.
Som ett resultat av den kombinerade magnetiseringen bildar de magnetiska kraftlinjerna ett slags böjar och gör det möjligt att upptäcka defekter i olika riktningar inuti delen nära dess yta. För kombinerad magnetisering används ett applicerat magnetfält, och pol- och cirkulär magnetisering används i både det applicerade magnetfältet och magnetfältet för den remanenta magnetiseringen.
Användningen av ett applicerat magnetfält gör det möjligt att upptäcka defekter i delar gjorda av mjuka magnetiska material som många stål, och det kvarvarande magnetfältet är applicerbart på hårda magnetiska material som högkolhaltiga och legerade stål.
Efter upptäckt av defekter avmagnetiseras delarna av växlande magnetfält… Sålunda används likströmmen direkt för defektdetekteringsprocessen och växelströmmen för avmagnetisering. Magnetisk defektoskopi tillåter detektering av defekter som inte finns djupare än 7 mm från ytan av den undersökta delen.
För att utföra magnetiska defekter på delar gjorda av icke-järn- och järnmetaller, beräknas värdet på den erforderliga magnetiseringsströmmen i ett applicerat magnetfält i proportion till diametern: I = 7D, där D är delens diameter i millimeter, Jag är strömmens styrka. För analys i det remanenta magnetiseringsområdet: I = 19D.

Bärbara feldetektorer av typen PMD-70 används ofta inom industrin.
Detta är en universell feldetektor. Den består av en strömförsörjningsdel inklusive en nedtrappningstransformator 220V till 6V med en effekt på 7 kW, samt autotransformator och en annan transformator 220V till 36V, från kopplings-, mätnings-, styr- och signalanordningar, från magnetiseringsdel inklusive rörlig kontakt, kontaktdyna, fjärrkontakter och spole, från slambad.
När omkopplaren B är sluten, via kontakterna K1 och K2, tillförs ström till AT-autotransformatorn. Autotransformatorn AT matar nedtrappningstransformatorn T1 220V till 6V, från vars sekundärlindning den likriktade spänningen tillförs de spännmagnetiseringskontakter H, till de manuella kontakterna P och till spolen installerad i spännkontakterna.
Eftersom transformatorn T2 är parallellkopplad med autotransformatorn, kommer ström också att flyta genom transformatorns T2 primärlindning när omkopplaren B är stängd. Signallampa CL1 indikerar att enheten är ansluten till nätverket, signallampa CL2 indikerar att krafttransformatorn T1 också är påslagen. Switch P har två möjliga lägen: i position 1 — långtidsmagnetisering för att upptäcka defekter i ett applicerat magnetfält, i position 2 — momentan magnetisering i restmagnetiseringsfältet.
Enligt schemat för PMD-70-feldetektorn:
B — paketomkopplare, K1 och K2 — kontakter för magnetstartare, RP1 och RP2 — kontakter, P — switch, AT — autotransformator, T1 och T2 — nedtrappningstransformatorer, KP — magnetstartares styrspole, KR — mellanreläspole , VM — magnetomkopplare, SL1 och SL2 — signallampor, R — manuella magnetiseringskontakter, H — magnetiserande klämkontakter, M — mikrobrytare, A — amperemeter, Z — klocka, D — diod.
När omkopplaren P är i läge 1, stänger mikrobrytaren M, styrspolen för magnetstartaren KP är ansluten till transformatorn T1, vars sekundärlindning försörjer den och kontakterna på det mellanliggande reläet RP1. Kretsen visar sig vara sluten. Startanordningen gör att kontakterna K1 och K2 sluts, kraftsektionen och med den magnetiseringsanordningarna får ström.
När omkopplaren P är i läge 2, slås spolen på mellanreläet KR på parallellt med startspolen. När mikrobrytaren är stängd stängs kortslutningskontakten, vilket gör att mellanreläet slås på, RP2-kontakterna stänger, RP1-kontakterna öppnas, magnetstartaren kopplas ur och K1- och K2-kontakterna öppnas. Processen tar 0,3 sekunder. Tills mikrobrytaren stänger kommer reläet att förbli avstängt eftersom kortslutningskontakten blockerar RP2-kontakterna. Efter att ha öppnat mikrobrytaren återgår systemet till sitt ursprungliga tillstånd.
Strömmen på magnetiseringsanordningarna kan justeras med hjälp av AT-autotransformatorn, justera strömvärdet från 0 till 5 kA. Vid magnetisering avger klockan 3 pip.Om magnetiseringsströmmen flyter kontinuerligt kommer signalen att vara kontinuerlig och SL2-signallampan kommer att fungera i samma läge. Vid kortvarig strömförsörjning kommer även klockan och lampan att fungera en kort tid.