Elektrisk axel och dess tillämpning i den elektriska drivningen av metallskärmaskiner
 Artikeln diskuterar enheten, funktionsprincipen och exempel på användningen av elektriska system för synkron rotation (elektrisk axel) i metallskärmaskiner och installationer.
Artikeln diskuterar enheten, funktionsprincipen och exempel på användningen av elektriska system för synkron rotation (elektrisk axel) i metallskärmaskiner och installationer.
Antag att två axlar som inte är mekaniskt förbundna med varandra ska rotera med samma hastighet utan att vrida sig i förhållande till varandra. För att säkerställa sådan synkron och i-fasrotation med motorerna D1 och D2, som roterar axlarna A respektive II (Fig. 1), anslut extra asynkrona maskiner A1 och A2 med fasrotorer. Rotorlindningarna på dessa maskiner är anslutna mot varandra.
Om rotationshastigheterna för de två maskinerna och positionerna för deras rotorer är desamma, är de elektromotoriska krafterna som induceras i lindningarna på rotorerna på maskinerna A1 och A2 lika och riktade mot varandra (fig. 2, a), och strömmen flyter inte i rotorkretsen.
Antag att rotationsriktningen för fältet för hjälpmaskinerna sammanfaller med rotorriktningen för deras rotorer.När rotationen av maskin A2 saktar ner kommer dess rotor att släpa efter A1, vilket resulterar i t.ex. etc. c. Ep2 inducerad i rotorlindningen kommer att skifta i fas till frammatningen (fig. 2, b), och i rotorkretsen för maskinerna A1 och A2 under verkan av vektorsumman av e. etc. med E visas utjämningsströmmen Az.
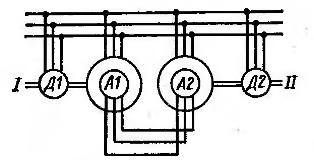
Ris. 1. Schema för synkron kommunikation
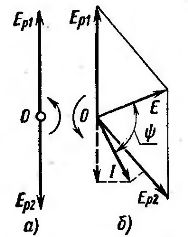
Ris. 2. Vektordiagram över det synkrona kommunikationssystemet
Den nuvarande vektorn I kommer att släpa efter vektorn e. etc. med E i vinkeln φ... Aktuell vektorprojektion Az på vektorn e osv. v. Ep2 sammanfaller med denna vektor i riktning. Projektionen av den aktuella vektorn på vektorn e. etc. s. Ep1 riktar sig till honom. Det följer att maskin A2 kommer att arbeta i motorläge och maskin A1 i generatorläge. I detta fall kommer axeln på maskin A2 att accelereras och axeln på maskin A1 kommer att bromsas. På så sätt kommer maskinerna att utveckla vridmoment som återställer axlarnas synkrona rotation. I och II och den tidigare samordnade positionen i rymden för rotorerna på maskinerna A1 och A2. Dessa maskiners rotorer kan rotera både i fältets rotationsriktning och i motsatt riktning.
Detta system kallas ett elektriskt synkronrotationssystem... Det kallas också för en elektrisk axel... Synkronrotationssystemet kan ersätta till exempel blyskruvar i skruvsvarvar.
Eftersom matningskretsarna i metallskärmaskiner, jämfört med huvudrörelsens kretsar, vanligtvis förbrukar låg effekt, kan ett enklare schema för synkron rotation användas för att synkronisera huvudrörelsen med matningen (fig. 3).I det här fallet är en konstant oöverensstämmelse mellan positionerna för rotorerna på maskinerna A1 och A2 oundviklig, utan vilken det inte skulle finnas någon ström i rotorkretsen för maskin A2 och den skulle inte kunna övervinna momentet av motståndskrafterna för matningskretsen. Eftersom A2-maskinen får ström från statorn och rotorn, kräver detta elektriska axelsystem en sextrådsanslutning till motorn, installerad i många fall på ett rörligt maskinblock, vanligtvis visat i den streckade linjen.
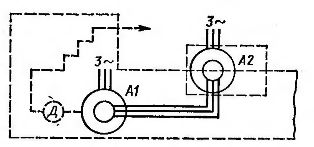
Ris. 3. Synkrona kommunikationssystem för en tung skruvsvarv
Inom vinkelavvikelsen, som inte överstiger 90 °, ökar det elektriska synkroniseringsmomentet. För att säkerställa ett betydande synkroniseringsvridmoment måste synkrona kommunikationsmaskiner vid alla möjliga vinkelfrekvenser arbeta med stora glidningar (inte mindre än 0,3 - 0,5). Därför måste dessa maskiner vara tillräckligt stora för att undvika oacceptabel uppvärmning.
Maskinernas kraft ökas ytterligare i ett försök att eliminera påverkan av lastfluktuationer och friktionskrafter. Mekaniska transmissioner används också, som minskar rotationsfrekvensen för maskinaxlarna och följaktligen storleken på vinkelfelet reducerat till maskinaxeln. Innan driften av den elektriska axeln påbörjas är de asynkrona maskinerna A1 och A2 anslutna till en enfas strömförsörjning. I detta fall intar rotorn på maskin A2 sitt initiala läge, vilket motsvarar positionen för rotorn på maskin A1.
Synkrona rotationssystem används rationellt för tungmetallskärmaskiner, eftersom produktionen av långa blyskruvar är förknippad med betydande svårigheter.Dessutom, när längden på skruvarna eller axlarna ökar, på grund av deras vridning, minskar noggrannheten i koordineringen av det inbördes arrangemanget av maskindelarna. I ett elektriskt axelsystem kan avståndet mellan axlarna inte påverka driftens noggrannhet.
Vid användning av en elektrisk axel elimineras de mekaniska anslutningarna av bromsoken till spindeln och kinematiskt diagram förenklas avsevärt. En betydande nackdel med elektriska axelsystem i skärmaskiner för tungmetaller är möjligheten till skada på en dyr del vid ett strömavbrott, eftersom felinriktning uppstår omedelbart. I vissa fall, i en sådan olycka, kan skador på arbetsstycket förhindras genom snabb automatisk indragning av verktyget.
Ett schema med två identiska asynkronmotorer med fasrotorer är av intresse för maskinteknik (fig. 4). Eftersom båda rotorernas krets är sluten till reostaten R, när motorerna är anslutna till AC-nätet, börjar båda rotorerna att rotera.
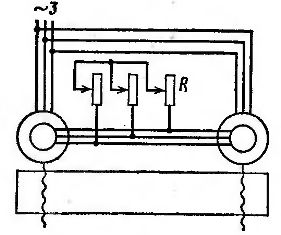
Ris. 4. Schema för synkron kommunikation med en roterande reostat
Förutom de strömmar som flyter i rotor- och reostatlindningarna flyter en utjämningsström i rotorkretsen på båda maskinerna. Närvaron av denna ström gör att ett synkroniseringsvridmoment uppstår, som ett resultat av vilket maskinerna roterar synkront. Detta system kan användas för att höja och sänka tvärarmarna på stora hyvlar, överfräsar och karuseller.
Tack vare det elektriska axelsystemet löses problemet med samordnad rörelse av transportörer som ingår i ett produktionskomplex.Den mest praktiska tillämpningen i detta fall erhålls från varianten av synkron rotation av motorer med en gemensam frekvensomformare.
Utöver de elektriska axelsystemen för maskinbyggnad som övervägs har andra AC-maskinsystem utvecklats och använts, inklusive enfassystem och system med synkronmotorer av specialkonstruktion.