Grundläggande parametrar och egenskaper hos elektromagnetiska reläer
 En elektrisk apparat som tillämpar reläets regleringslag kallas relä... I ett relä, när styrparametern (ingång) smidigt ändras till ett visst inställt värde, ändras den styrda (utgångs) parametern abrupt. Dessutom måste minst en av dessa parametrar vara elektrisk.
En elektrisk apparat som tillämpar reläets regleringslag kallas relä... I ett relä, när styrparametern (ingång) smidigt ändras till ett visst inställt värde, ändras den styrda (utgångs) parametern abrupt. Dessutom måste minst en av dessa parametrar vara elektrisk.
Handling av funktionella organ elektromagnetiskt relä kan spåras enligt diagrammet i fig. 1. Mottagningskroppen A omvandlar ingångsvärdet (spänningen) Uin som tillförs magnetkretsens 1 spole 2 till ett mellanvärde, dvs. i ankarets mekaniska kraft 3. Ankarets FЯ mekaniska kraft verkar på det verkställande organets B kontaktsystem. Mellanvärdet — kraften hos ankaret FЯ, är proportionell mot ingångsvärdet Uin, jämförs med en givet värde av kraften Fpr utvecklad av fjädern 9 hos mellankroppen B. När Uin <Uav, Fya
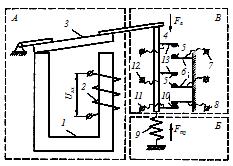 Ris. 1 Schema för det elektromagnetiska reläet
Ris. 1 Schema för det elektromagnetiska reläet
I driftprocessen särskiljer det elektromagnetiska reläet på en tidsskala fyra faser: perioden (tid) för aktivering tav, arbetsperioden twork, perioden (tid) för avstängning toff, perioden (tid) för vilo tp (fig. . 2).
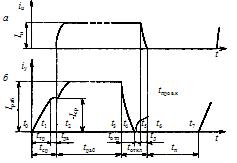
Ris. 2. Beroende av mängden utgång (a) och utgång (b) i tid
Aktiveringsperiod för ett elektromagnetiskt relä
 Svarsperioden inkluderar tidsintervallet från det att insignalen börjar påverka övervakningsorganet tills signalen uppträder i den styrda kretsen. Segmentet av abskissaxeln tav = t2 –t0 motsvarar denna period i fig. 2, b. I ögonblicket t0 ökar strömmen i reläspolen till ett värde vid vilket den elektromagnetiska kraften Fe som verkar på ankaret börjar motverka fjäderkraften Fm (mekanisk kraft) hos den mellanliggande kroppen. Ingångsvärdet kallas då acceptansvärdet.
Svarsperioden inkluderar tidsintervallet från det att insignalen börjar påverka övervakningsorganet tills signalen uppträder i den styrda kretsen. Segmentet av abskissaxeln tav = t2 –t0 motsvarar denna period i fig. 2, b. I ögonblicket t0 ökar strömmen i reläspolen till ett värde vid vilket den elektromagnetiska kraften Fe som verkar på ankaret börjar motverka fjäderkraften Fm (mekanisk kraft) hos den mellanliggande kroppen. Ingångsvärdet kallas då acceptansvärdet.
Den initiala perioden motsvarar segmentet ttr = t1 — t0. Vid tidpunkten t1 börjar reläelektromagnetens ankare att röra sig. Under tdv = t2 — t1 rör sig ankaret, övervinner motståndet från mellankroppen B (se fig. 1) och aktiverar exekutivorganet C.
Vid slutet av ankarslaget stänger drivkontakterna, belastningsströmmen i (fig. 2, a) börjar öka från noll till ett jämviktsvärde. Ingångsvärdet vid vilket styrningen av utgångskretsen börjar kallas acceptansvärdet (Iav). Effekten Psr som motsvarar Isr kallas aktiveringseffekten.
Svarstid t cf = ttr + tdv.
Svarstiden för elektromagnetiska reläer varierar från 1-2 till 20 ms. Elektromagnetiska tidsreläer ger en fördröjning på upp till 10 s.
För att uppskatta reläets svarstid är det tillåtet att använda uttrycket
t cf = t1kz-bm –a,
där t1 är svarstiden för en given säkerhetsfaktor ks och faktorn m = 1; a, b — koefficienter som bestäms beroende på typen av relä och värdena på kz och m.
För höghastighetsreläer vid kz = 1,5¸2 närmar sig värdet på koefficienten a enhet. För vanliga reläer med k z = 1,5¸3, värdet a = 0,25¸0,95, är värdet på koefficienten b vanligtvis i intervallet 1,4-1,6.
Driftsperiod för det elektromagnetiska reläet
 I arbetsperioden ingår tidsintervallet twork = t3 — t2, d.v.s. tiden från tidpunkten för styrning av utgångskretsen t2 till det ögonblick då inverkan på det känsliga organet av insignalen t3 upphör. Strömmen börjar stiga till ett stationärt värde på Iwork (Fig. 2, b) - detta är arbetsvärdet för ingångsvärdet, vilket säkerställer tillförlitlig drift av reläet.
I arbetsperioden ingår tidsintervallet twork = t3 — t2, d.v.s. tiden från tidpunkten för styrning av utgångskretsen t2 till det ögonblick då inverkan på det känsliga organet av insignalen t3 upphör. Strömmen börjar stiga till ett stationärt värde på Iwork (Fig. 2, b) - detta är arbetsvärdet för ingångsvärdet, vilket säkerställer tillförlitlig drift av reläet.
Förhållandet Iwork / Icr = kz kallas säkerhetsfaktorn i arbetet.
För att karakterisera överbelastningskapaciteten hos reläets känsliga element används värdet på ingångsmängden, vilket kallas gränsvärdet för driftmängden Idrift.max.
Begränsning av arbetsvärdet — detta är dess värde som det känsliga organet kan motstå under en kort normaliserad tidsperiod. Värdet på detta värde är dock oacceptabelt när reläet arbetar i normalt läge på grund av tillståndet av elektrisk eller mekanisk styrka eller uppvärmning.
Styreffektkonceptet Ru används för att karakterisera relädriftens lastkapacitet. Styreffekt är den effekt i den kontrollerade kretsen som frekvensomriktaren kan överföra under lång tid.
Utlösningsperiod för elektromagnetiskt relä
 Avperioden innehåller tidsintervallet toff = t6 — t3, d.v.s. tiden från ögonblicket av upphörande av påverkan på det uppfattande organet t3 till det ögonblick då strömmen i den kontrollerade kretsen minskar till noll (fig. 16, a).
Avperioden innehåller tidsintervallet toff = t6 — t3, d.v.s. tiden från ögonblicket av upphörande av påverkan på det uppfattande organet t3 till det ögonblick då strömmen i den kontrollerade kretsen minskar till noll (fig. 16, a).
Avstängningsperioden inkluderar utlösningsperioden totp = t4 — t3 där reläet är avstängt. Strömmen iy i reläspolen sjunker till noll (fig. 2, b). Under denna period överstiger den motsatta fjäderkraften (mekanisk kraft) den elektromagnetiska kraften, dvs. Fm> Fe och ankaret släpps.
Efter val av kontaktfel (intervall tc = t5 — t4) öppnas reläkontakterna och en ljusbåge tänds mellan dem, som slocknar efter tiden td = t6 — t5. Under perioden td minskar strömmen i den styrda kretsen från In till noll (fig. 2, a).
Avstängningstid t t = tp + tc + td.
Utlösningsperioden kännetecknas av en återhämtningsfaktor, som är förhållandet mellan fallströmmen Iotp och pickupströmmen Iav: kv = Iotp / Icr.
Typiskt för kraftsystemskyddsreläer och styrreläer som styr ingångsparametern inom snäva gränser, bör kv vara närmare enhet.
Viloperiod för det elektromagnetiska reläet
Viloperioden är tidsintervallet tp = t7 — t6.
Latensperioden kännetecknas av en parameter som kallas det inoperativa värdet, vilket är det största värdet på ingångskvantiteten, vilket säkerställer att reläet inte fungerar eller hålls kvar. Avstängningstiden är kortare än driftstarttiden och frigöringstiden.
Förhållandet mellan styreffekt och aktiveringseffekt kallas förstärkning, ku = Py / Pcr.
Antalet starter per tidsenhet bestäms av ett värde som är omvänt proportionellt mot cykeltiden:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota O.B.