Mekaniska egenskaper hos elmotorer och produktionsmekanismer
 Vid konstruktion av en elektrisk drivning måste elmotorn väljas så att dess mekaniska egenskaper matchar produktionsmekanismens mekaniska egenskaper. De mekaniska egenskaperna anger förhållandet mellan variablerna i stationärt tillstånd.
Vid konstruktion av en elektrisk drivning måste elmotorn väljas så att dess mekaniska egenskaper matchar produktionsmekanismens mekaniska egenskaper. De mekaniska egenskaperna anger förhållandet mellan variablerna i stationärt tillstånd.
En mekanisk egenskap hos mekanismen kallas förhållandet mellan vinkelhastigheten och mekanismens motståndsmoment, reducerat till motoraxeln) ω = f (Mc).
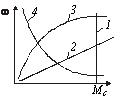
Ris. 1. Mekaniska egenskaper hos mekanismer
Bland alla sorter finns det flera karakteristiska typer av mekaniska egenskaper hos mekanismerna:
1. Karakteristisk med ett motståndsmoment oberoende av hastighet (rät linje 1 i fig. 1). Den hastighetsoberoende mekaniska karakteristiken är ritad som en rät linje parallell med rotationsaxeln, i detta fall vertikal. En sådan egenskap har till exempel kranar, vinschar, kolvpumpar med konstant leveranshöjd etc.
2.En egenskap med ett motståndsmoment linjärt beroende av hastigheten (rad 2 i fig. 1). Detta beroende är till exempel inneboende i drivningen av en oberoende exciterad likströmsgenerator som arbetar med konstant belastning.
3. Karakteristisk med en icke-linjär ökning av vridmomentet (kurva 3 i fig. 1). Typiska exempel är driften av fläktar, centrifugalpumpar, propellrar. För dessa mekanismer beror momentet Mc på kvadraten av vinkelhastigheten ω... Detta är den s.k. parabolisk (fläkt) mekanisk egenskap.
4. Karakteristisk med icke-linjärt minskande motståndsmoment (kurva 4 i fig. 1). Här är dragmomentet omvänt proportionellt mot rotationshastigheten. I detta fall förblir effekten konstant under hela mekanismens driftshastighetsområde. Till exempel, i mekanismerna för huvudrörelsen hos vissa metallskärmaskiner (svarvning, fräsning, borrning), ändras ögonblicket Mc omvänt proportionellt mot ω, och den effekt som förbrukas av mekanismen förblir konstant.
Mekaniska egenskaper hos den elektriska motorn kallas beroendet av dess vinkelhastighet på vridmomentet ωd = f (M). Här bör man komma ihåg att momentet M på motoraxeln, oavsett rotationsriktning, har ett positivt tecken — rörelsemomentet. Samtidigt har motståndsögonblicket Mc ett negativt tecken.
Som exempel visar fig. 2 visar de mekaniska egenskaperna: 1 — synkronmotor; 2 — DC-motor med oberoende magnetisering; 3 — DC-motor med seriemagnetisering.
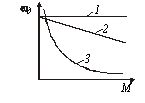 Ris. 2. Mekaniska egenskaper hos elektriska motorer
Ris. 2. Mekaniska egenskaper hos elektriska motorer
För att utvärdera egenskaperna hos de mekaniska egenskaperna hos en elektrisk drivning används begreppet karakteristisk styvhet.Styvheten hos den mekaniska egenskapen bestäms av uttrycket
β = dM/dω
där dM — förändring av motorns vridmoment; dωd — motsvarande förändring i vinkelhastighet.
För linjära egenskaper förblir värdet β konstant, för icke-linjära beror det på arbetspunkten.
Med hjälp av detta koncept kan funktionerna som visas i fig. 2, kan kvalitativt utvärderas enligt följande: 1 — absolut stel (β = ∞); 2 — fast; 3 — mjuk.
En absolut svår egenskap — motorns rotationshastighet förblir oförändrad när motorbelastningen ändras från noll till nominell. Synkronmotorer har denna egenskap.
Stel karakteristik — rotationshastigheten ändras lite när belastningen ändras från noll till nominell. Denna egenskap har en parallellt exciterad DC-motor samt en induktionsmotor i området för den linjära delen av karakteristiken.
En stel karakteristik anses vara en där hastighetsändringen inte överstiger cirka 10 % av den nominella hastigheten när lasten ändras från noll till nominell.
Mjuk karakteristik — motorhastigheten ändras avsevärt med relativt små förändringar i belastningen. Denna egenskap innehas av en likströmsmotor med serie-, blandad eller parallell excitation, men med ytterligare resistans i ankarkretsen, såväl som asynkron med resistans i rotorkretsen.
För de flesta produktionsmekanismer används asynkrona ekorrburmotorer, som har stela mekaniska egenskaper.
Alla mekaniska egenskaper hos elmotorer är indelade i naturliga och konstgjorda.
Naturliga mekaniska egenskaper hänvisar till motorns driftsförhållanden med parametrarnas nominella värden.
Till exempel, för en parallellexciterad motor, kan den naturliga karakteristiken plottas för det fall där ankarspänningen och exciteringsströmmen har nominella värden och det inte finns något ytterligare motstånd i ankarkretsen.
Den naturliga egenskapen för en induktionsmotor motsvarar märkspänningen och märkfrekvensen för den växelström som tillförs motorstatorn, förutsatt att det inte finns något extra motstånd i rotorkretsen.
För varje motor kan alltså endast en naturlig egenskap byggas och ett obegränsat antal konstgjorda. Till exempel har varje nytt värde på ankarmotståndet hos en DC-motor eller i rotorkretsen hos en induktionsmotor sina egna mekaniska egenskaper.
