Vad är en linjär differentialtransformator
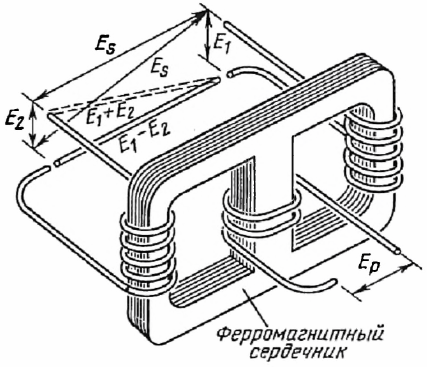
En växelström som flyter i en primärspole kan användas för att inducera en växelspänning i två sekundärspolar. Om de två sekundärlindningarna är identiska i sina egenskaper och de två banorna för magnetfältslinjerna som passerar genom dessa spolar också är identiska, kommer de två genererade sekundära spänningarna att vara lika. En enhet med denna struktur kallas en differentialtransformator.

En differentialtransformator kan ha en luftkärna eller en magnetisk kärna.
Två sekundärlindningar kan anslutas antingen i fas eller motfas, i det första fallet läggs deras spänningar till varandra och i det andra fallet subtraheras den ena från den andra.
En primärlindning används för att driva två symmetriska sekundärlindningar, varav den senare kan anslutas så att sekundärspänningarna adderas till eller subtraherar från varandra.
Om två spolar är anslutna enligt ett subtraktionsschema, kommer den totala sekundära spänningen att vara noll vid samma värden på deras spänningar.Om magnetkretsegenskaperna för en av dessa spolar avsiktligt ändras jämfört med magnetkretsegenskaperna för den andra spolen, kommer de två sekundära spänningarna att skilja sig och deras skillnad kommer inte att vara noll.
Under dessa förhållanden indikerar fasen för den totala sekundärspänningen vilken bana av magnetfältslinjerna som har störst motstånd, medan amplituden för denna spänning återspeglar värdet på reluktansskillnaden.
Om samma åtgärd används för att öka det magnetiska motståndet för en väg och för att minska det magnetiska motståndet för den andra vägen, så når utspänningen som reflekterar denna åtgärd sitt maximala värde, och överföringsfunktionen kommer att ha största möjliga linjäritet.
Eftersom inga två sekundärlindningar och inga två vägar av magnetfältslinjer kan göras exakt lika, har en differentialtransformator alltid en bestämd utspänning, även med noll användbar signal vid ingången.
Dessutom är egenskaperna hos magnetiska kretsar icke-linjära. Som ett resultat av denna icke-linjäritet uppträder även harmoniska komponenter av grundfrekvensen för den pålagda primära exciteringsspänningen, vilka inte kan kompenseras fullt ut i något arrangemang av sekundärlindningarna.
Reluktansen hos en ferromagnetisk krets med luftgap är en funktion av spaltbredden med stark olinjäritet. Som ett resultat är induktansen hos en spole lindad runt en sådan krets också en icke-linjär funktion av gapets bredd.
Samtidigt, om det finns två mer eller mindre identiska banor för magnetfältslinjerna, var och en med ett luftgap, och om bredden på ett gap ökar när bredden på det andra minskar, då är skillnaden i magnetiskt motstånd för dessa banor kan variera tillräckligt linjärt.
De grundläggande principerna för differentialtransformatorn förkroppsligas i praktiken i en mängd olika specifika designkonfigurationer för många olika ändamål.
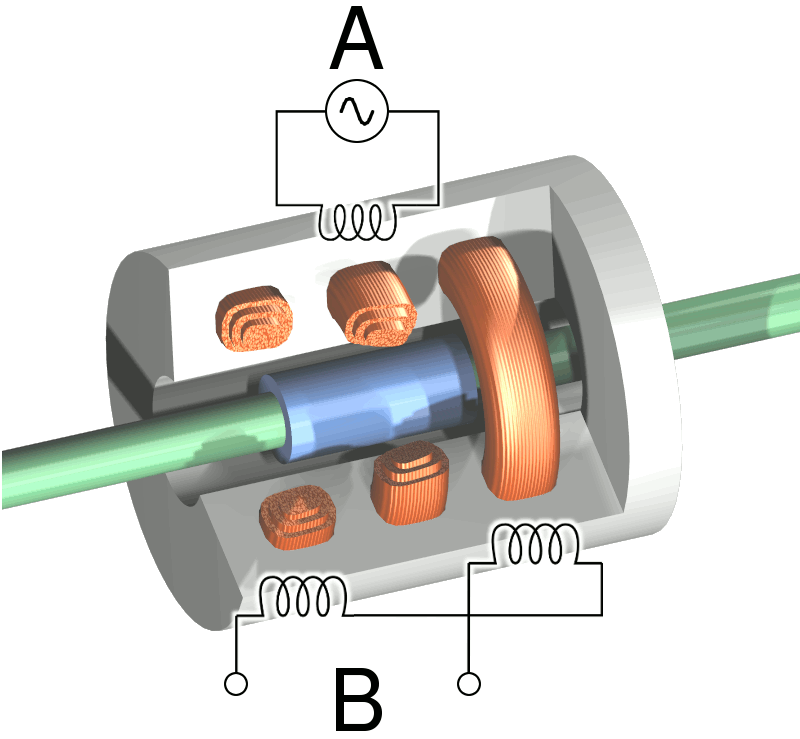
Linear Variable Differential Transformer (LVDT) är en passiv givare (sensor) som arbetar enligt principen om ömsesidig induktion och kan användas för att mäta förskjutning, töjning, tryck och vikt.
Oftast kan de som använder NS användas för att mäta förskjutning i intervallet från flera millimeter till centimeter, och direkt omvandla I'm-förskjutningen till en elektrisk signal.
Induktansen för spolen nära eller inuti vilken den ferromagnetiska staven är belägen är en funktion av koordinaten för positionen för denna stav relativt spolen med stark olinjäritet.
Om en sådan stav är en ferromagnetisk krets av någon differentialtransformator, kan den sekundära differentialspänningen tjäna som en indikator på stavens förskjutning, beroende linjärt nog på denna förskjutning.
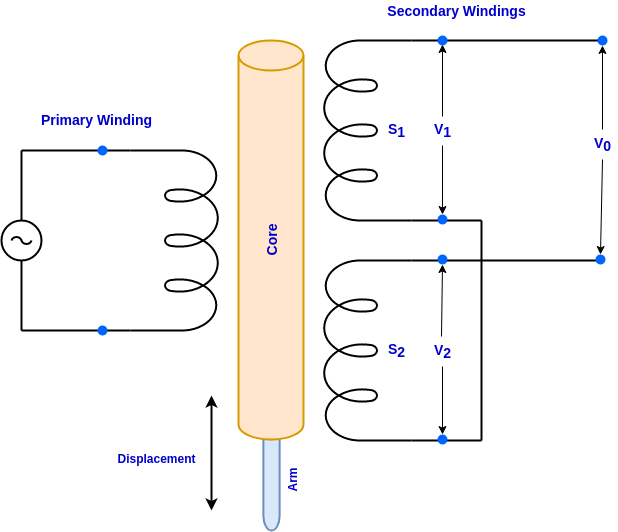
Primärlindningen är ansluten till en AC-källa. De två sekundärlindningarna S1 och S2 har lika många varv och är monterade i serie mittemot varandra.
Således är den EMF som induceras i dessa lindningar 180° ur fas med varandra och därmed upphäver den totala effekten.

Positionen för den symmetriska ferromagnetiska kärnan som tillhandahålls i konstruktionen av differentialtransformatorn kan bestämmas från sekundärspänningens fas och amplitud.
Den absoluta skillnaden mellan de två sekundära spänningarna indikerar det absoluta värdet av stavens förskjutning i förhållande till mitt- eller nollläget, och fasen för denna olika spänning indikerar förskjutningens riktning.
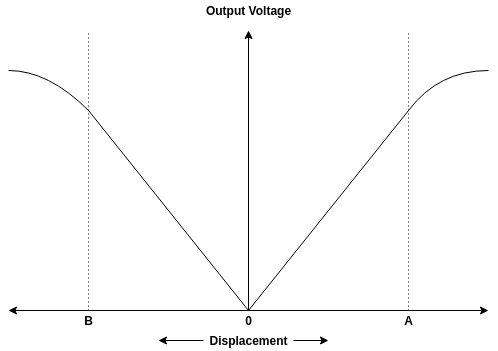
B/I-kurvan för en linjär variabel differentialtransformator visas i figuren.
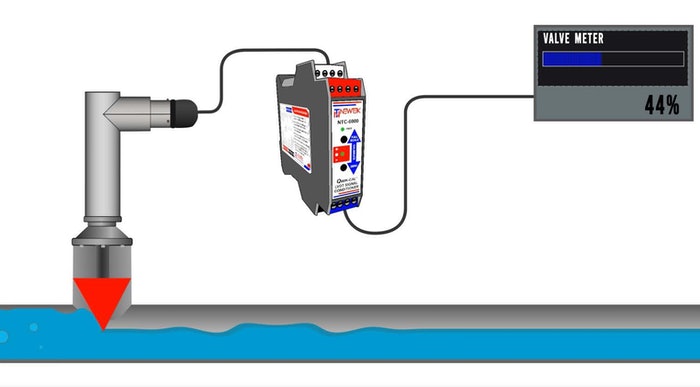
Ett exempel på användning av en linjär differentialtransformator för att ge korrekt positionsåterkoppling för ventilövervakning och kontroll i kemiska anläggningar, kraftverk och jordbruksutrustning:
Dränkbara deplacementsensorer LVDT D5W:
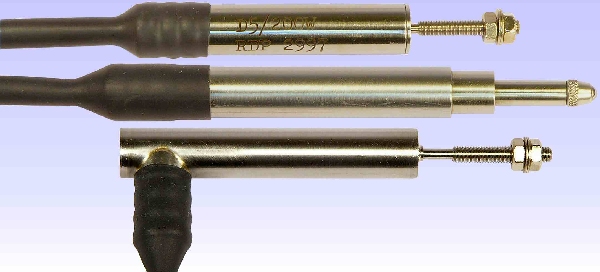
Dessa givare är designade för att mäta förskjutning och position. De ger noggrann mätning av positionen för ankaret (gliddelen) i förhållande till förskjutningssensorhuset.
Nedsänkbara deplacementgivare är utformade för att göra mätningar medan de är nedsänkta i lämpliga vätskor. Icke-magnetiska vätskor kan svämma över ankarröret utan att påverka omvandlarens funktion. Dessa omvandlare finns i okontrollerade eller fjäderreturversioner.
Vid automatisering av olika tekniska processer används ofta bilaterala omvandlare med en differentialtransformator med en ferromagnetisk kärna, som sätts in i sina ändar på lika avstånd i de två sekundära spolarna.
När stången rör sig axiellt, rör den sig djupare in i en av dessa spolar och sträcker sig från den andra.Den absoluta skillnaden mellan de två sekundära spänningarna indikerar det absoluta värdet av stavens förskjutning i förhållande till mitt- eller nollläget, och fasen för denna olika spänning indikerar förskjutningens riktning.
Roterande AC differentialtransformator:
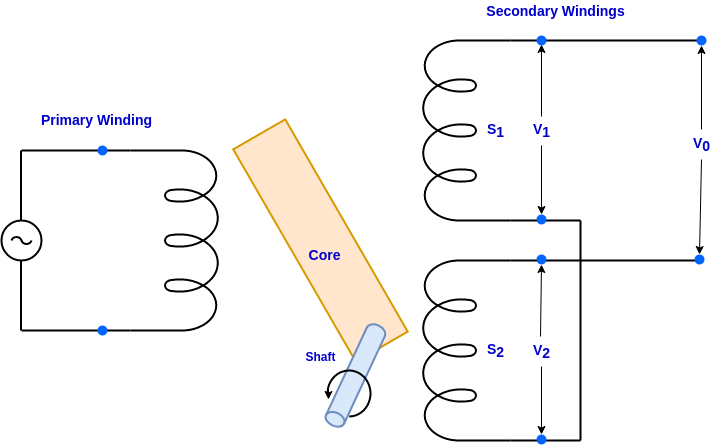
En roterande variabel differentialtransformator är en passiv transformator baserad på principen om ömsesidig induktion. Den används för att mäta vinkelförskjutning.
Dess design liknar den för en linjär variabel differentialtransformator förutom kärnkonstruktionen.
Primärlindningen är ansluten till en AC-källa. De två sekundärlindningarna S1 och S2 har lika många varv och är monterade i serie mittemot varandra.
Fördelar med linjär differentialtransformator:
-
Det finns ingen fysisk kontakt mellan kärnan och spolarna;
- Hög tillförlitlighet;
-
Snabbt svar;
-
Lång livslängd.
Det är den mest använda induktiva sensorn på grund av sin höga noggrannhet.