Sensoranslutningsdiagram
Anslutningsscheman för sensorer, mer allmänt kallade mätkretsar, är utformade för att omvandla sensorns utgångsvärde, och i de flesta fall är detta en förändring av deras inre motstånd, till ett mer bekvämt värde för efterföljande användning. I regel är detta en elektrisk ström eller spänningsförändring som antingen kan bestämmas direkt med hjälp av en elektrisk mätanordning eller, efter förstärkning, matas till ett lämpligt ställdon eller registreringsanordning.

För dessa ändamål används följande växlingsscheman i stor utsträckning:
-
konsekvent,
-
trottoar,
-
differentiell,
-
kompenserande.
Sekventiellt kretsschema består av en likströms- eller växelströmskälla, själva Rx-sensorn, en mätanordning eller direktdrivmekanism och vanligtvis ett extra motstånd Rd som begränsar strömmen i denna krets (fig. 1). En sådan omkopplingskrets används oftast bara med kontaktsensorer för vilka Rx = 0 eller Rx = ?.
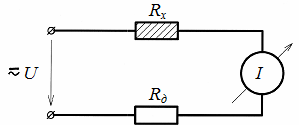
Ris. 1. Seriell krets för anslutning av sensorer
För när man arbetar med andra sensorer i mätanordningens krets, flyter alltid en elektrisk ström som bestäms av uttrycket I = U /(Rx + Rd), och en liten förändring i sensorns inre motstånd leder till en mycket liten förändring i denna ström. Som ett resultat används minimidelen av mätanordningens skala, och mätningens noggrannhet reduceras praktiskt taget till noll. För de flesta andra sensorer används därför speciella mätkretsar, som avsevärt ökar mätningens känslighet och noggrannhet.
Mest använda bro krets omkoppling, där en och ibland flera sensorer är kopplade på ett visst sätt tillsammans med ytterligare motstånd i en fyrkant (den s.k. Winston Bridge), som har två diagonaler (fig. 2). En av dem, kallad a-b power diagonal, är utformad för att ansluta en DC- eller AC-källa, och den andra, c-d-mätdiagonal, inkluderar en mätanordning.
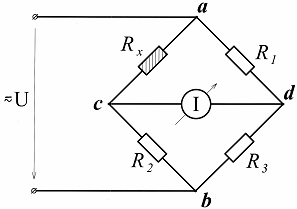
Ris. 2. Bryggkrets för anslutning av sensorer
Om produkterna av motståndsvärdena på de motsatta sidorna av fyrhörningen (broarmar) är lika Rx x R3 = R1NS R2 kommer potentialerna för punkterna c och d att vara lika och det kommer inte att finnas någon ström i mätdiagonalen. Detta tillstånd för bryggkretsen kallas vanligtvis bryggbalans, dvs. bryggkretsen är balanserad.
Om motståndet hos Rx-sensorn ändras på grund av yttre påverkan, kommer balansen att störas och en ström som är proportionell mot förändringen i detta motstånd kommer att flyta genom mätanordningen. I det här fallet indikerar riktningen för denna ström hur sensorns motstånd har förändrats (ökat eller minskat).Här, med ett lämpligt val av mätanordningens känslighet, allt arbetsskala.
Den övervägda bryggkretsen kallas obalanserad, eftersom mätningsprocessen äger rum kl obalans bro, dvs. obalans. En obalanserad bryggkrets används oftast i de fall då sensorns motstånd under påverkan av yttre krafter kan förändras mycket snabbt per tidsenhet, men då istället för en mätanordning är det mer ändamålsenligt att använda en registreringsanordning som registrerar dessa ändringar.
Det anses vara mer känsligt balanserad bryggkrets, i vilken en speciell mätreostat R (fig. 3), utrustad med en skala och i mättekniken kallad rheochord, dessutom är kopplad till två intilliggande armar.
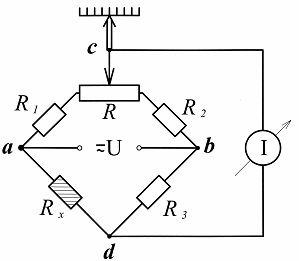
Ris. 3. Balanserad bryggkrets
När man arbetar med en sådan krets, med varje förändring av sensorns motstånd, måste bryggkretsen balanseras om med den medföljande reglaget, d.v.s. medan det inte finns någon ström i mätdiagonalen. I det här fallet bestäms värdet på den uppmätta parametern (ändring av sensorns motståndsvärde) av en speciell skala som är utrustad med denna post och kalibrerad i enheter av det värde som mäts av sensorn.
Den högre noggrannheten hos den balanserade bryggan förklaras av det faktum att det är lättare att fastställa bristen på ström i mätanordningen än att direkt mäta dess värde, och balansering av bryggan i sådana fall utförs som regel med hjälp av en speciell elmotor styrd av bryggkretsens obalanssignal.
Bryggkretsar för omkoppling av sensorer anses vara universella, eftersom de kan drivas av både lik- och växelström, och viktigast av allt kan flera sensorer anslutas till dessa kretsar samtidigt, vilket bidrar till att öka inte bara känsligheten utan också mätnoggrannhet.
Differentialkrets inkluderingen av sensorer är byggd med hjälp av en speciell transformator som drivs av ett växelströmsnätverk, vars sekundära lindning är uppdelad i två identiska delar. I denna krets (fig. 4) bildas således två intilliggande kretsar, som var och en har sin egen strömslinga I1 och I2. Och värdet på strömmen i mätanordningen bestäms av skillnaden mellan dessa strömmar, och om resistanserna hos sensorn Rx och det extra motståndet Rd är lika, kommer det inte att finnas någon ström i mätanordningen.
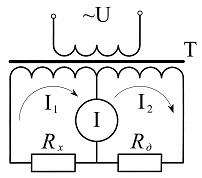
Ris. 4. Omkopplingskrets för differentialsensor
När sensorns resistans ändras, kommer en ström som är proportionell mot denna förändring att flyta genom mätanordningen, och fasen för denna ström kommer att bero på arten av förändringen i detta motstånd (ökning eller minskning). Endast växelström används för att driva differentialkretsen, och därför är det lämpligare att använda reaktiva sensorer (induktiva eller kapacitiva) som sensorer.
Det är särskilt bekvämt att använda en sådan omkopplingskrets när man arbetar med differentiella induktiva eller kapacitiva sensorer. Vid användning av sådana sensorer registreras inte bara storleken på rörelsen, till exempel för den ferromagnetiska kärnan (fig. 5), utan också riktningen för denna rörelse (dess tecken), vilket resulterar i att fasen av den alternerande ström som passerar genom mätanordningen ändras.Detta ökar känsligheten för mätningen ytterligare.
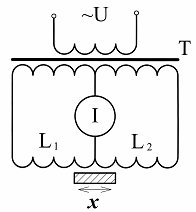
Ris. 5. Kopplingsschema för en induktiv differentialgivare
Det bör noteras att för att öka noggrannheten i mätningen används i vissa fall andra typer av liknande mätkretsar, t.ex. balanserade differentialkretsar… Sådana kretsar inkluderar antingen ett repeterat ackord eller en speciell mätautotransformator med en speciell skala, och mätprocessen med sådana kretsar liknar mätningar med en balanserad bryggkrets.
Ersättningssystem införandet av sensorer anses vara den mest exakta av alla de som diskuterats ovan. Dess funktion är baserad på utspänningskompensation eller EMF. en sensor lika med den vad gäller spänningsfallet i mätreostaten (reokord). Endast en DC-källa används för att driva kompensationskretsen och den används huvudsakligen med DC-generatorsensorer.
Låt oss titta på funktionen av denna krets med hjälp av exemplet att använda ett termoelement som en sensor (fig. 6).
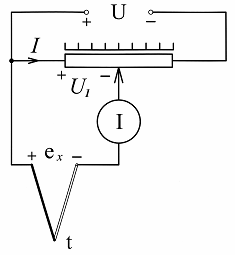
Ris. 6. Kompensationskrets för inkoppling av termoelektrisk sensor
Under inverkan av den applicerade spänningen U flyter en ström genom mätreostaten, vilket orsakar ett fall i spänningen U1 i sektionen av reostaten från dess vänstra utgång till motorn. Om denna spänning och EMF-termoelementen är lika - kommer det inte att gå någon ström genom glukometern.
Om värdet på emf-sensorn ändras, är det nödvändigt att uppnå frånvaron av denna ström igen med hjälp av reglaget för reglaget. Här, som i jämviktsbryggkretsen, värdet på den uppmätta parametern, i vårt fall temperaturen (emf termoelement) bestäms av skalan på glidtråden, och rörelsen av dess motor utförs, oftast också med hjälp av en speciell elektrisk motor.
Kompensationskretsens höga noggrannhet beror på det faktum att den elektriska energin som genereras av sensorn under mätningen inte förbrukas, eftersom strömmen i kretsen av dess inkludering är noll. Denna krets kan även användas med parametriska sensorer, men då behövs en extra DC-källa som används i den parametriska sensorns strömförsörjningskrets.