Synkronmaskiner — motorer, generatorer och kompensatorer
 Synkronmaskiner är elektriska växelströmsmaskiner där rotorn och statorströmmarnas magnetfält roterar synkront.
Synkronmaskiner är elektriska växelströmsmaskiner där rotorn och statorströmmarnas magnetfält roterar synkront.
Trefas synkrona generatorer är de mest kraftfulla elektriska maskinerna. Enhetseffekten för synkrona generatorer vid vattenkraftverk är 640 MW och vid termiska kraftverk - 8 - 1200 MW. I en synkronmaskin är en av lindningarna ansluten till ett AC-nät och den andra exciteras av DC. Växelströmslindningen kallas ankarlindningen.
Armaturlindningen omvandlar all elektromagnetisk kraft i synkronmaskinen till elektrisk kraft och vice versa. Därför placeras den vanligtvis på en stator, som kallas ankare. Excitationsspolen förbrukar 0,3 - 2% av den konverterade effekten, därför är den vanligtvis placerad på en roterande rötor, som kallas en induktor, och den låga exciteringseffekten tillförs av släpringar eller beröringsfria magnetiseringsanordningar.
 Det magnetiska ankarfältet roterar med en synkron hastighet n1 = 60f1 / p, rpm, där p = 1,2,3 … 64, etc. är antalet polpar.
Det magnetiska ankarfältet roterar med en synkron hastighet n1 = 60f1 / p, rpm, där p = 1,2,3 … 64, etc. är antalet polpar.
Med industriell nätverksfrekvens f1 = 50 Hz, ett antal synkrona hastigheter vid olika antal poler: 3000, 1500, 1000, etc.). Eftersom induktorns magnetfält är stationärt i förhållande till rotorn måste rotorn rotera med samma synkrona hastighet för den kontinuerliga växelverkan mellan induktorns och ankarets fält.
 Konstruktion av synkronmaskiner
Konstruktion av synkronmaskiner
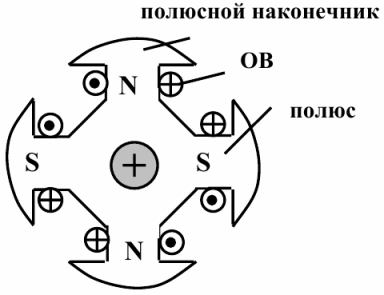
Statorn för en synkronmaskin med en trefaslindning skiljer sig inte i konstruktion asynkron maskinstator, och rotorn med en spännande spole är av två typer - framträdande pol och implicit pol. Vid höga hastigheter och ett litet antal stolpar används implicita-polrotorer eftersom de har en mer hållbar struktur, och vid låga hastigheter och ett stort antal poler används salient-polrotorer av modulär konstruktion. Styrkan hos sådana rotorer är mindre, men de är lättare att tillverka och reparera. Synbar polrotor:
 De används i synkronmaskiner med ett stort antal poler och ett motsvarande lågt n. Vattenkraftverk (hydrogeneratorer). frekvens n från 60 till flera hundra varv per minut. De mest kraftfulla hydrogeneratorerna har en rotordiameter på 12 m med en längd på 2,5 m, p — 42 och n = 143 rpm.
De används i synkronmaskiner med ett stort antal poler och ett motsvarande lågt n. Vattenkraftverk (hydrogeneratorer). frekvens n från 60 till flera hundra varv per minut. De mest kraftfulla hydrogeneratorerna har en rotordiameter på 12 m med en längd på 2,5 m, p — 42 och n = 143 rpm.
Indirekt rotor:
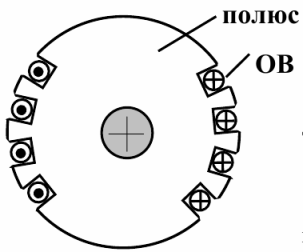 Lindning — diameter d = 1,2 — 1,3 m i rotorkanalerna, rotorns aktiva längd är inte mer än 6,5 m. TPP, NPP (turbingeneratorer). S = 500 000 kVA i en maskin n = 3000 eller 1500 rpm (1 eller 2 polpar).
Lindning — diameter d = 1,2 — 1,3 m i rotorkanalerna, rotorns aktiva längd är inte mer än 6,5 m. TPP, NPP (turbingeneratorer). S = 500 000 kVA i en maskin n = 3000 eller 1500 rpm (1 eller 2 polpar).
Utöver fältspolen finns en spjäll eller dämpspole på rotorn som används för start i synkronmotorer. Denna spole är gjord liknande en kortslutningsspole för ekorrbur, endast av en mycket mindre sektion, eftersom rotorns huvudvolym tas upp av fältspolen.I olikformiga rotorer spelas spjälllindningens roll av ytorna på rotorns solida tänder och de ledande kilarna i kanalerna.
Likström i exciteringslindningen av en synkron maskin kan tillföras från en speciell DC-generator installerad på maskinens axel och kallas exciter, eller från nätet genom en halvledarlikriktare.  Se även om detta ämne:
Se även om detta ämne:
Syfte och arrangemang av synkronmaskiner
Hur synkrona turbos och hydrogeneratorer fungerar
En synkronmaskin kan fungera som en generator eller en motor. En synkronmaskin kan fungera som motor om trefas nätström tillförs statorlindningen. I detta fall, som ett resultat av interaktionen mellan statorns och rotorns magnetfält, bär statorfältet rotorn med sig. I detta fall roterar rotorn i samma riktning och med samma hastighet som statorfältet.

Generatordriftssättet för synkronmaskiner är det vanligaste och nästan all elektrisk energi genereras av synkrona generatorer Synkronmotorer används med effekt över 600 kW och upp till 1 kW som mikromotorer. Synkrongeneratorer för spänningar upp till 1000 V används i enheter för autonoma strömförsörjningssystem.
Enheter med dessa generatorer kan vara stationära och mobila. De flesta enheter används med dieselmotorer, men de kan drivas av gasturbiner, elmotorer och bensinmotorer.
En synkronmotor skiljer sig från en synkrongenerator endast genom en startdämpningsspole, vilket bör säkerställa goda startegenskaper hos motorn.
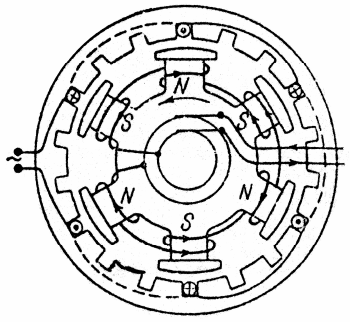
Schema för en sexpolig synkrongenerator.Tvärsnitt av lindningarna i en fas (tre seriekopplade lindningar) visas. Lindningarna i de andra två faserna passar in i de fria slitsarna som visas i figuren. Faserna är kopplade i stjärna eller delta.
Generatorläge: motorn (turbinen) roterar rotorn, vars spole matas med konstant spänning? det finns en ström som skapar ett permanent magnetfält. Magnetfältet roterar med rotorn, korsar statorlindningarna och inducerar en EMF av samma storlek och frekvens men förskjuten med 1200 (symmetriskt trefassystem).
Motorläge: statorlindningen är ansluten till ett trefasnät och rotorlindningen till en likströmskälla. Som ett resultat av interaktionen av maskinens roterande magnetfält med excitationsspolens likström uppstår ett vridmoment Mvr, som driver rotorn att rotera med magnetfältets hastighet.
Mekanisk egenskap hos en synkronmotor — beroende n (M) — är en horisontell sektion.
Educational Filmstrip - "Synchronous Motors" producerad av Educational Materials Factory 1966.
Du kan se den här: Filmstrip «Synchronous Motor»
 Användning av synkronmotorer Massanvändningen av asynkronmotorer med en betydande underbelastning komplicerar driften av kraftsystem och stationer: effektfaktorn i systemet minskar, vilket leder till ytterligare förluster i alla enheter och linjer, såväl som till deras otillräckliga användning i termer av aktiv kraft. Därför blev användningen av synkronmotorer nödvändig, särskilt för mekanismer med kraftfulla drivningar.
Användning av synkronmotorer Massanvändningen av asynkronmotorer med en betydande underbelastning komplicerar driften av kraftsystem och stationer: effektfaktorn i systemet minskar, vilket leder till ytterligare förluster i alla enheter och linjer, såväl som till deras otillräckliga användning i termer av aktiv kraft. Därför blev användningen av synkronmotorer nödvändig, särskilt för mekanismer med kraftfulla drivningar.
Synkronmotorer har en stor fördel jämfört med asynkronmotorer, vilket är att de tack vare DC-excitering kan arbeta med cosphi = 1 och inte förbrukar reaktiv effekt från nätverket, och under drift, när de överexciteras, ger de till och med reaktiv effekt till nätverk. Som ett resultat förbättras nätverkets effektfaktor och spänningsfallet och förlusterna i det minskas, liksom effektfaktorn för de generatorer som arbetar i kraftverk.
Det maximala vridmomentet för en synkronmotor är proportionellt mot U, och för en asynkronmotor U2.
Därför, när spänningen sjunker, behåller synkronmotorn en högre belastningskapacitet. Dessutom gör användningen av möjligheten att öka excitationsströmmen för synkronmotorer det möjligt att öka deras tillförlitlighet i händelse av nödspänningsfall i nätverket och att i dessa fall förbättra driftsförhållandena för kraftsystemet som helhet. På grund av den större storleken på luftgapet är de ytterligare förlusterna i stålet och i rotorburen hos synkronmotorer mindre än för asynkronmotorer, därför är effektiviteten hos synkronmotorer vanligtvis högre.
Å andra sidan är konstruktionen av synkronmotorer mer komplicerad än squirrel-cage induktionsmotorer, och dessutom måste synkronmotorer ha en exciter eller annan anordning för att mata en DC-spole. Som ett resultat är synkronmotorer i de flesta fall dyrare än asynkrona ekorrburmotorer.
Under driften av synkronmotorer uppstod avsevärda svårigheter att starta dem.Dessa svårigheter har redan övervunnits.

Start och varvtalsreglering av synkronmotorer är också svårare. Emellertid är fördelen med synkronmotorer så stor att det vid höga effekter är tillrådligt att använda dem där frekventa starter och stopp och varvtalsreglering inte krävs (motorgeneratorer, kraftfulla pumpar, fläktar, kompressorer, kvarnar, krossar och etc.). ).
Se även:
Typiska scheman för start av synkronmotorer
Elektromekaniska egenskaper hos synkronmotorer
Synkrona kompensatorer
Synkrona kompensatorer är utformade för att kompensera nätverkets effektfaktor och bibehålla nätverkets normala spänningsnivå i områden där konsumentbelastningar är koncentrerade. Det överexciterade driftsättet för den synkrona kompensatorn är normalt när den levererar reaktiv effekt till nätet.
I detta avseende kallas kompensatorer, såväl som kondensatorbanker som tjänar samma syften, installerade på konsumenttransformatorstationer, också reaktiva kraftgeneratorer. Men i perioder med minskad användarbelastning (till exempel på natten) är det ofta nödvändigt att använda synkrona kompensatorer och i underexciteringsläge, när de förbrukar induktiv ström och reaktiv effekt från nätverket, eftersom nätverksspänningen i dessa fall tenderar att öka, och för att upprätthålla den på en normal nivå, är det nödvändigt att ladda nätverket med induktiva strömmar, vilket orsakar ytterligare spänningsfall i det.
För detta ändamål är varje synkron kompensator utrustad med en automatisk exciterings- eller spänningsregulator, som reglerar storleken på magnetiseringsströmmen så att spänningen vid kompensatorns terminaler förblir konstant.