Selsyns: syfte, anordning, handlingsprincip
 Selsyns är en speciell typ av växelströmsmaskin med effekt från några watt till flera hundra watt (mindre än en kilowatt). Betjänar Selsyn för att på distans överföra den mekaniska rotationsvinkeln elektriskt mellan enheter som inte har någon mekanisk koppling till varandra.
Selsyns är en speciell typ av växelströmsmaskin med effekt från några watt till flera hundra watt (mindre än en kilowatt). Betjänar Selsyn för att på distans överföra den mekaniska rotationsvinkeln elektriskt mellan enheter som inte har någon mekanisk koppling till varandra.
Varje selsin har en stator och en rotor på vilka växelströmslindningarna är placerade. Det finns spolar med en enda lindning på statorn och en lindning med tre lindningar på rotorn, och vice versa, med en lindning med tre lindningar på statorn och en lindning med en lindning på rotorn, och slutligen med en lindning med tre lindningar på statorn och med samma lindning på rotorn.
Enligt deras syfte i autoregleringssystem är selsyns indelade i:
- Selsyn sensorer,
- selsyn mottagare
- differentiell.
För att förstå driften av selsyn, överväg Fig. 1, a.
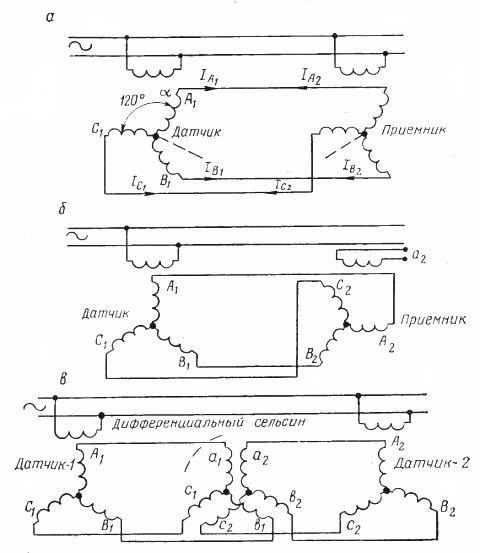
Ris. 1. Schema för att slå på selsin: a — enligt systemsensorn — mottagare; b — Transformatormottagare i transformatorläge. c — differential
Selsyn-sensorn och Selsyn-mottagaren med sina enkellindade statorlindningar är anslutna till samma AC-nätverk, och de tre-lindade rotorlindningarna är anslutna till varandra. Om du nu vrider sensorrotorn till valfri vinkel, så kommer mottagarrotorn att rotera till samma vinkel. Om sensorrotorn roterar kontinuerligt med en slumpmässig hastighet, kommer mottagarrotorn att rotera med samma hastighet.
Selsin-anslutningens verkan är baserad på principen om elektromagnetisk induktion, som är följande. Växelströmmen i den enkellindade statorlindningen inducerar strömmar i den trelindade rotorlindningen, vars värden beror på den relativa positionen för rotorn och statorlindningarna.
Om rotorerna för de två selsinerna är lika åtskilda med avseende på deras statorer, är strömmarna i rotorernas anslutningstrådar lika och motsatta till varandra, och därför är strömmen i varje spole noll. Som ett resultat är axelvridmomentet för båda selsyn noll.
Om du nu manuellt eller på annat sätt vrider rotorn på selsin-sensorn till en viss vinkel, kommer balansen av strömmar mellan rotorerna att störas, och ett vridmoment kommer att uppstå på axeln på selsin-mottagaren, på grund av vilket dess rotor kommer att rotera , medan obalansen i strömmarna försvinner, det vill säga tills denna rotor tar samma position som synkrosensorn.

I autoregleringssystem arbetar Selsyn-mottagaren ofta i transformatorläge (Fig. 1, b). I det här fallet är mottagarens rotor fixerad stationär och dess statorlindning är frånkopplad från nätverket. I denna spole induceras e. etc. v. på sidan av rotorn, genom vars lindningar strömmar flyter på grund av positionen av rotorn hos Selsyn-sensorn.Detta innebär att värdet av e. etc. med terminalerna är mottagarens rotor proportionell mot sensorns rotationsvinkel.
I utgångsläget är rotorerna förskjutna 90° i förhållande till varandra, och i detta fall t.ex. etc. s. är noll. Nu när rotorsensorn roteras, kommer e att induceras på mottagarrotorn. etc. med Ep, proportionell mot rotorernas divergensvinkel
Epr = Emax x sinθ
Differentialselsynen används i de fall där det är nödvändigt att kontrollera skillnaden i rotationsvinklarna för två axlar, d.v.s. deras diskrepans. I detta fall är två selsinsensorer placerade på två axlar, vars hastigheter jämförs med varandra.Rotorerna hos dessa selsins är anslutna med trelindade lindningar till statorns trelindade lindningar och rotorn på den tredje selsin, som är differentiell (Fig. 1, in). Selsyn-differentialrotorns rotationsvinkel är lika med skillnaden mellan Selsyn-sensorernas rotationsvinklar.