Effekt av elmotorbelastning på verkningsgrad och effekt
Effektreserv i allmänhet eller underbelastning av elmotorn orsakar försämring av effektivitet och effekt. Ibland är det nödvändigt att känna till de faktiska värdena för dessa koefficienter för att bestämma värdena för den aktiva och reaktiva effekten som förbrukas av elmotorn från nätverket.
Effektiviteten hos elmotorer vid belastningar mindre än nominellt kan bestämmas med formeln:
där ηnom är elmotorns nominella verkningsgrad.
För att bestämma β, använd formeln:

där Kz är förhållandet mellan den faktiska belastningen och den nominella (belastningsfaktorn);
α — koefficient antagen lika med:
• för DC-motorer med seriemagnetisering - från 0,5 (för låg hastighet) till 1 (för hög hastighet);
• för elmotorer med parallell excitation - från 1 (för låg hastighet) till 2 (för hög hastighet);
• för asynkrona elmotorer — från 0,5 till 1; för kran och synkrona elmotorer — upp till 2.
Värdena effektfaktor induktionsmotor beror på många faktorer och är strängt taget olika för varje elmotor, även av samma typ.
Under konstruktionsförhållanden är det dock tillräckligt att bara veta de ungefärliga medelvärdena för effektfaktorn beroende på de förväntade belastningarna.
Från ett förenklat cirkeldiagram erhålls följande förhållande:

Beteckningar — se fig. 1.
där tanφ1, är tangenten för fasvinkeln som motsvarar den faktiska belastningen av elmotorn P1, kW; tanφnom — tangenten för fasskiftningsvinkeln som motsvarar den nominella belastningen för den elektriska motorn PH0M (bestäms av cosφnom som anges i motorpasset); σ-förhållandet mellan det vältande momentet och det nominella (är inom de smala gränserna 1,8-2);

K3 — lastfaktor.
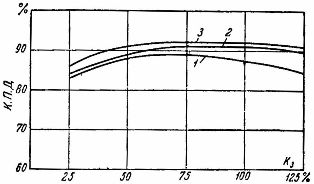
Ris. 1. Verkningsgradskurvor för asynkrona olika elmotorer beroende på belastning.
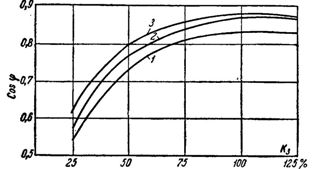
Ris. 2. Kurvor av effektfaktorn för asynkrona elmotorer beroende på belastningen.
Kurvorna för beroendet av η och cosφ på belastningen för de vanligaste typerna av asynkrona elektriska motorer ges i fig. 1 och 2.