Metodik för att bestämma elförluster i ledningar, transformatorer och elmotorer
Bestämning av effektförluster i ledningen
Effektförluster ΔE (kW • h) i ledningen, transformator för räkenskapsperioden (månad, kvartal, år) i produktionsförhållanden, med hjälp av resultaten från experimentella mätningar, rekommenderas att bestämma från uttrycket
där Eh.s — elförluster för en typisk dag under räkenskapsperioden, kW • h; n är antalet arbetsdagar under räkenskapsperioden.
Helgeffektförluster beräknas separat.
Typiska dagar för räkenskapsperioden är följande:
-
enligt posterna i loggboken, bestäm energiförbrukningen för redovisningsperioden;
-
enligt den fastställda förbrukningen för rapporteringsperioden fastställs den genomsnittliga dagliga förbrukningen av el;
-
enligt loggboken hittas en dag som har samma (eller nära den) energiförbrukningen som det dygnsmedelvärde som erhållits ovan.
De sålunda hittade dagarna och deras faktiska lastschema antas vara typiska.
Elförlusterna i räkenskapsperiodens rad med hjälp av lastschemat för en typisk dag kan beräknas med formeln

där Kf är formfaktorn för belastningsdiagrammet; Ic är medelvärdet av linjeströmmen för en typisk dag, A; Re — ekvivalent aktivt motstånd för linjen, Ohm; Tr är antalet arbetstimmar för räkenskapsperioden.
För elektriska belastningar i de flesta industrianläggningar är Kf vanligtvis i intervallet 1,01-1,1. För ett företag vars produktionsprogram och tekniska process är ganska konstant varierar Kf inom mycket obetydliga gränser. Därför, för att beräkna förluster, måste denna koefficient bestämmas 3-5 gånger och, med ett medelvärde av dess värde över dessa avläsningar, anta en konstant inom rapporteringsperioden.
Under driftsförhållanden kan Kf för linjen beräknas med tillräcklig noggrannhet enligt avläsningarna från den aktiva energimätaren med formeln
där n = t / Δt är antalet räknaravläsningar; t — tidpunkt för bestämning av Kf, h; Δt — tidpunkten för en markering, h; Eai-aktiv elförbrukning för i:te markering av mätarställningen, kW • h; Ea är förbrukningen av aktiv el under tiden t som bestäms av mätaren, kW • h.
Genomsnittlig linjeström
där Ea (Er) är förbrukningen av aktiv (reaktiv) energi för en typisk dag, kW • h (kvar • h); U — linjespänning, kV; Tr är antalet arbetstimmar under en typisk dag; cosφav — det vägda medelvärdet av effektfaktorn för tiden Tr.
Motsvarande motstånd i drift
där ΔEa.s — förluster av aktiv energi i det förgrenade nätet under tiden T, kW • h; I är strömmen av huvuddelen av nätverket, A.
Ibland (för komplexa kretsar) är det mycket svårt att bestämma motsvarande resistans med hjälp av instrumentets avläsningar. I det här fallet kan de bestämmas genom beräkning.
För en rak linje med koncentrerad ändlast

där r0 är det aktiva motståndet vid 1 m av linjen; l — linjelängd, m.
För den grenade linjen som visas i fig. 1,
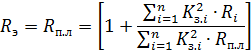
där Rp.l. — aktivt motstånd hos matningsledningen; Ri är det aktiva motståndet för i-ro-ledningssektionen från slutet av matningsledningen till lasten; K3i = Pi / P1 — belastningsfaktor för i-te jämfört med den mest belastade sektionen, tagen först.
Ovanstående formel härleds under antagandet att sektionernas effektfaktorer är ungefär lika med varandra.
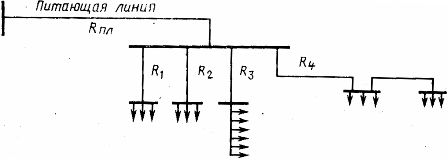
Ris. 1. Strömkrets för lasten bort från TP-verkstadsskenorna
Bestämning av effektförluster i transformatorer
Förluster av aktiv el i transformatorer för rapportperioden

där ΔPXX. — tomgångseffektförluster, kW; ΔРКЗ — kortslutningseffektförlust, kW; T0, Tr — antalet timmars anslutning av transformatorn till nätverket och antalet timmars drift av transformatorn under belastning för rapporteringsperioden. Kz = ICp / Inom. t är transformatorns nuvarande belastningsfaktor; ICp — Transformatorns medelström för rapporteringsperioden, A; Inom t är transformatorns märkström, A.
Se här för mer information: Hur man bestämmer förlusten av el i en krafttransformator
Bestämning av effektförluster i elmotorer
För stora enheter (kvarnar för slipning av flis och fibrer, flis, kompressorer, pumpar etc.) är det nödvändigt att ta hänsyn till förlusterna av elektricitet i motorerna och i de mekanismer som drivs av dem i enhetens elektriska balans.
Under stationär drift av elektriska motorer bestäms förlusterna i dem som summan av förluster i metallen i lindningarna, stål och mekaniska. Förluster i lindningarnas metall bestäms av formlerna ovan, där de istället för Ra ersätter: för DC-motorer - ankarmotstånd r0, Ohm; för synkronmotorer — statormotstånd r1, Ohm; för asynkronmotorer — statormotståndet och rotormotståndet r1 + r2 reducerat till statorn, Ohm.
Stålförluster ΔEa.s (kW • h) bestäms med hjälp av instrument tillgängliga på stora motorer (aktiv energimätare, amperemeter). För lindade rotorasynkronmotorer

där P0 är den öppna rotoreffekten som bestäms av mätaren eller wattmätaren, kW; I1.o — statorström med öppen rotor bestäms av motoramperemetern, A.
För alla motorer, förutom asynkrona med en fasrotor, bör stålförluster inte separeras som ett oberoende element i den elektriska balansen på grund av komplexiteten i ett sådant val. Eftersom förlusterna i motorns stål beror lite på dess belastning, såväl som på de mekaniska förlusterna, är det lämpligt att bestämma dem endast i allmänhet med den senare.
Mekaniska förluster ΔEmech (kW • h) i enheten och elektriska förluster i stålet i den reducerade motorn

För DC-maskiner

där Px.x är tomgångseffekten för motorn som är ansluten till mekanismen, bestämd av räknaren eller wattmätaren, kW; Ixx-motorns tomgångsström bestäms av motoramperemetern, A.
Eftersom stålförlusterna för induktionsmotorer med lindad rotor bestäms av formeln som angetts tidigare, kan de mekaniska förlusterna särskiljas med den näst sista formeln.
För DC-maskiner är stålförlusterna en liten bråkdel jämfört med mekaniska förluster. Med tanke på att det på motoraxeln, förutom sina egna förluster, också finns mekaniska förluster av drivmekanismen, är det möjligt att ignorera förlusterna i stål utan större fel och anta att den sista formeln bestämmer de mekaniska förlusterna av motorn och mekanism .