Generatorsystem — DC-motor
 Olika verktygsmaskiner kräver ofta steglös styrning av drivhastigheten över ett större område än vad som kan åstadkommas genom att justera det magnetiska flödet. DC-motor med parallell magnetisering… I dessa fall används mer komplexa elektriska drivsystem.
Olika verktygsmaskiner kräver ofta steglös styrning av drivhastigheten över ett större område än vad som kan åstadkommas genom att justera det magnetiska flödet. DC-motor med parallell magnetisering… I dessa fall används mer komplexa elektriska drivsystem.
I fig. 1 visar ett diagram över en justerbar elektrisk drivning enligt ett generator-motorsystem (förkortat G — D). I detta system roterar en induktionsmotor IM kontinuerligt en oberoende exciterad DC-generator G och en exciter B, som är en parallell-exciterad lågeffekt DC-generator.
DC-motorn D driver maskinens arbetskropp. Excitationslindningarna för generatorn OVG och motorns ATS tillförs av magnetiseringsanordningen B. Genom att ändra resistansen i magnetiseringskretsen för generatorn G av reostat 1, ändras spänningen på motorns D ankare, och därmed motorns hastighet regleras. I detta fall arbetar motorn med fullt och konstant flöde eftersom reostat 2 tas bort.
När spänningen U ändras ändras hastigheten n0 idealt tomgångsvarvtal D. Eftersom motorflödet och dess ankarkretsresistans inte ändras, förblir lutningen b konstant. Därför är de rätlinjiga mekaniska egenskaperna som motsvarar olika värden på U placerade under varandra och parallella med varandra (fig. 2).
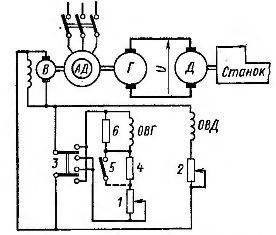
Ris. 1. Systemgenerator - DC-motor (dpt)
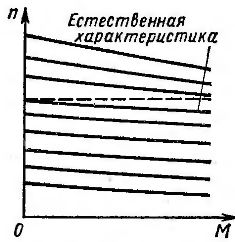
Ris. 2. Mekaniska egenskaper hos generatorn — DC-motorsystem
De har en större lutning än egenskaperna hos samma elektriska motor som matas från det konstanta nätverket, eftersom i G - D-systemet spänningen U vid en konstant excitationsström av generatorn minskar med ökande belastning enligt beroendet:
där t.ex. och rg — e, respektive. etc. s. och generatorns inre resistans.
I analogi med asynkronmotorer betecknar vi
Detta värde kännetecknar minskningen av motorvarvtalet när belastningen ökar från noll till nominell. För parallella mekaniska egenskaper
Detta värde ökar när n0 minskar. Vid stora värden på sn kommer de angivna skärförhållandena att förändras avsevärt med slumpmässiga lastfluktuationer. Därför är spänningsregleringsområdet vanligtvis mindre än 5:1.
När motorernas märkeffekt minskar, ökar spänningsfallet över motorerna och de mekaniska egenskaperna blir brantare. Av denna anledning reduceras spänningsregleringsområdet för G -D-systemet när effekten minskar (för effekter mindre än 1 kW till 3:1 eller 2:1).
När generatorns magnetiska flöde minskar, påverkar avmagnetiseringseffekten av dess ankarreaktion dess spänning i större utsträckning. Därför har de egenskaper som är förknippade med låga motorvarvtal faktiskt en större lutning än de mekaniska egenskaperna.
Utvidgningen av reglerområdet uppnås genom att reducera det magnetiska flödet hos motorn D med hjälp av reostat 2 (se fig. 1), som produceras vid generatorns fulla flöde. Denna metod för hastighetsreglering motsvarar egenskaper som ligger ovanför den naturliga en (se fig. 2).
Det totala reglerområdet, lika med produkten av kontrollområdena för båda metoderna, når (10 — 15): 1. Spänningsreglering är konstant vridmomentkontroll (eftersom motorns magnetiska flöde förblir oförändrat). Reglering genom att ändra det magnetiska flödet hos motorn D är en konstant effektreglering.
Innan motorn startas tas D reostat 2 (se fig. 1) helt bort och motorflödet når det högsta värdet. Då ökar reostaten 1 exciteringen av generatorn G. Detta gör att spänningen ökar och motorns D hastighet ökar. Om spolen OVG är ansluten omedelbart till fullspänningen UB för excitern B, kommer strömmen i den, som i alla kretsar med induktans och aktivt motstånd, att öka:
där rv är resistansen hos excitationsspolen, LB är dess induktans (försumma effekten av magnetkretsens mättnad).
I fig. 3 visar a (kurva 1) en graf över excitationsströmmens beroende av tiden. Excitationsströmmen ökar gradvis; ökningstakten bestäms av förhållandet

där Tv är den elektromagnetiska tidskonstanten för generatorns excitationslindning; den har tidsdimensionen.
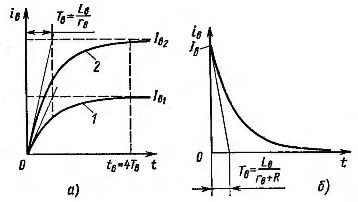
Ris. 3. Ändring av excitationsströmmen i G-D-systemet
Förändringen i generatorspänningen vid uppstart har ungefär samma karaktär som förändringen i magnetiseringsström. Detta gör det möjligt för motorn att automatiskt starta med reostat 1 borttagen (se fig. 1).
Ökningen av generatorns exciteringsström accelereras (tvingas) ofta genom att i det initiala ögonblicket applicera en spänning som överstiger den nominella spänningen på exciteringslindningen. Sedan kommer processen att öka exciteringen att fortsätta längs kurva 2 (se fig. 3, en ). När strömmen i spolen når Iv1, lika med stationär magnetiseringsström vid märkspänningen, reduceras magnetiseringsspolens spänning till den nominella. Stigtiden för magnetiseringsströmmen till det nominella reduceras.
För att tvinga fram exciteringen av generatorn väljs exciteringsspänningen V (se fig. 1) 2-3 gånger högre än den nominella spänningen för generatorns exciteringsspol och ett ytterligare motstånd 4 införs i kretsen. …
Generator-motorsystemet möjliggör regenerativ bromsning. För att stoppa är det nödvändigt att strömmen i ankaret ändrar riktning. Vridmomentet kommer också att byta tecken och istället för att köra blir det bromsning. Stopp sker när det magnetiska flödet hos motorreostat 2 ökar eller när generatorspänningen minskar med reostat 1. I båda fallen, t.ex. etc. c. E på motorn blir högre än spänningen U på generatorn.I detta fall arbetar motor D i generatorläge och drivs i rotation av den kinetiska energin hos de rörliga massorna, och generator G arbetar i motorläge, roterar IM-maskinen med supersynkron hastighet, som samtidigt växlar till generatorläge och förser nätverket med ström.
Regenerativ bromsning kan utföras utan att påverka reostaterna 1 och 2. Du kan helt enkelt öppna generatorns magnetiseringskrets (t.ex. omkopplare 3). I detta fall kommer strömmen i en sluten krets bestående av excitationslindningen av generatorn och motståndet 6 gradvis att minska
där R är motståndet för motstånd 6.
Grafen som motsvarar denna ekvation visas i fig. 3, b. En gradvis minskning av generatorns excitationsström i detta fall motsvarar en ökning av resistansen hos reostat 1 (se fig. 1) och orsakar regenerativ bromsning. I denna krets är motståndet 6 anslutet parallellt med generatorns excitationslindning ett urladdningsmotstånd. Det skyddar magnetiseringslindningens isolering från skador i händelse av ett plötsligt nödavbrott i magnetiseringskretsen.
När magnetiseringskretsen avbryts, minskar maskinens magnetiska flöde kraftigt, inducerar e i magnetspolens varv. etc. c. självinduktansen är så stor att den kan göra att lindningsisoleringen går sönder. Urladdningsmotståndet 6 skapar en krets i vilken t.ex. etc. c. självinduktionen av fältspolen inducerar en ström som bromsar minskningen av det magnetiska flödet.
Spänningsfallet över urladdningsmotståndet är lika med spänningen över fältspolen.Ju lägre urladdningsmotståndets värde är, desto lägre är spänningen på excitationsspolen när kretsen bryts. Samtidigt, med en minskning av urladdningsmotståndets resistansvärde, strömmar strömmen kontinuerligt genom den i normalt läge och förlusterna i den ökar. Båda bestämmelserna måste beaktas vid val av urladdningsmotståndsvärde.
Efter att generatorns excitationslindning har stängts av kvarstår en liten spänning vid dess terminaler på grund av kvarvarande magnetism. Detta kan få motorn att snurra långsamt med så kallad kryphastighet. För att eliminera detta fenomen ansluts generatorns excitationslindning, efter att ha kopplats bort från excitern, till generatorns terminaler så att spänningen från restmagnetismen orsakar en avmagnetiseringsström i generatorns excitationslindning.
För att vända den elektriska motorn D ändras strömriktningen i excitationsspolen hos generatorn OVG G med omkopplare 3 (eller annan liknande anordning). På grund av spolens betydande induktans minskar excitationsströmmen gradvis, ändrar riktning och ökar sedan gradvis.
Processerna för att starta, stoppa och vända motorn i det övervägda systemet är mycket ekonomiska, eftersom de utförs utan användning av reostater som ingår i ankaret. Motorn startas och bromsas med hjälp av lätt och kompakt utrustning som endast styr små fältströmmar. Därför rekommenderas detta "generator - DC-motor"-system att användas för arbete med frekventa starter, bromsar och reverseringar.
De största nackdelarna med motor-generator-DC-systemet är relativt låg effektivitet, hög kostnad och besvärlig på grund av närvaron av ett stort antal elektriska maskiner i systemet. Priset på systemet överstiger priset för en asynkron ekorrburmotor med samma effekt 8-10 gånger. Dessutom sådana elektriskt drivsystem kräver mycket utrymme.