Frekvensreglering av en asynkronmotor
För närvarande används frekvensstyrning av rotationsvinkelhastigheten för en elektrisk drivning med en asynkronmotor i stor utsträckning, eftersom den gör det möjligt att inom ett brett område smidigt ändra rotorhastigheten både över och under det nominella värdet.
Frekvensomformare är moderna, högteknologiska enheter med ett brett justerområde som har en omfattande uppsättning funktioner för att styra asynkronmotorer. Den högsta kvaliteten och tillförlitligheten gör det möjligt att använda dem i olika industrier för att styra drivningar av pumpar, fläktar, transportörer, etc.

Frekvensomformare för matningsspänning är indelade i enfas och trefas, men genom design, i roterande och statiska elektriska maskiner. I elektriska maskinomvandlare erhålls den variabla frekvensen genom att använda konventionella eller speciella elektriska maskiner. V statiska frekvensomvandlare förändringen i frekvensen av matningsströmmen uppnås genom användning av elektriska element som inte har någon rörelse.
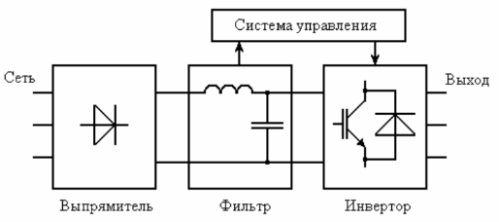
Frekvensomvandlarkrets för en induktionsmotor
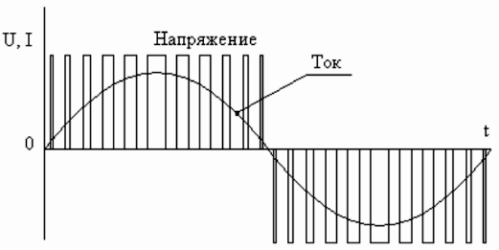
Utsignal från frekvensomformaren
Frekvensomformare för enfasnät kan tillhandahålla elektrisk drivning för produktionsutrustning med en effekt på upp till 7,5 kW. En egenskap hos designen av moderna enfasomvandlare är att det vid ingången finns en fas med en spänning på 220V, och vid utgången finns det tre faser med samma spänningsvärde, vilket gör det möjligt att ansluta trefasiga elektriska motorer till en enhet utan att använda kondensatorer.
Frekvensomriktare som drivs av 380V trefasnät finns tillgängliga i effektområdet från 0,75 till 630 kW. Beroende på effektvärdet produceras enheter i polymerkombinerade och metallhöljen.
Den mest populära styrstrategin för induktionsmotorer är vektorstyrning. För närvarande implementerar de flesta frekvensomvandlare vektorstyrning eller till och med sensorlös vektorstyrning (denna trend finns i frekvensomvandlare som ursprungligen implementerar skalär styrning och inte har terminaler för anslutning av en hastighetssensor).
Beroende på typen av utgångslast är frekvensomformare uppdelade enligt typen av implementering:
-
för pump- och fläktdrift;
-
för allmän industriell elektrisk framdrivning;
-
fungerar som en del av elmotorer som arbetar med överbelastning.

Mekaniska egenskaper för typiska laster
Moderna frekvensomformare har en mångfald av funktionella egenskaper, till exempel har de manuell och automatisk kontroll av motorns hastighet och rotationsriktning, samt inbyggd potentiometer på kontrollpanelen.Begåvad med förmågan att justera utgångsfrekvensområdet från 0 till 800 Hz.
Omvandlare kan automatiskt styra en asynkronmotor enligt signaler från perifera sensorer och driva en elektrisk drivning enligt en given tidsalgoritm. Stöd automatiska återställningsfunktioner vid kortvarigt strömavbrott. Utför transientstyrning från en fjärrkontroll och skydda elmotorer från överbelastning.

Sambandet mellan rotationsvinkelhastigheten och matningsströmmens frekvens följer av Ekv
ωo = 2πe1/p
Med en konstant matningsspänning U1 och en förändring i frekvens ändras induktionsmotorns magnetiska flöde. Samtidigt, för bättre användning av det magnetiska systemet, med en minskning av strömförsörjningsfrekvensen, är det nödvändigt att minska spänningen proportionellt, annars kommer magnetiseringsströmmen och förlusterna i stålet att öka avsevärt.
På samma sätt, när matningsfrekvensen ökar, måste spänningen öka proportionellt för att hålla det magnetiska flödet konstant, eftersom detta annars (med ett konstant axelvridmoment) kommer att leda till att rotorströmmen ökar, överbelastning av dess lindningar av ström och reducering av det maximala vridmomentet.
Lagen för rationell spänningsreglering beror på resistansmomentets natur.
Vid ett konstant moment av statisk belastning (Ms = const) måste spänningen regleras i proportion till dess frekvens U1 / f1 = const. För typen av fläktbelastning har förhållandet formen U1 / f21 = konst.
Med lastmoment omvänt proportionellt mot varvtal U1 /√f1 = konst.
Figurerna nedan visar ett förenklat anslutningsschema och mekaniska egenskaper hos en induktionsmotor med frekvensstyrning av vinkelhastighet.
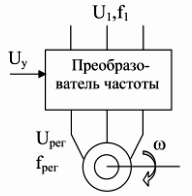
Anslutningsschema för en frekvensomformare till en asynkronmotor
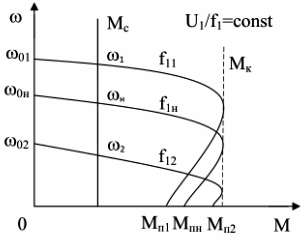
Egenskaper för en last med ett konstant statiskt motståndsmoment
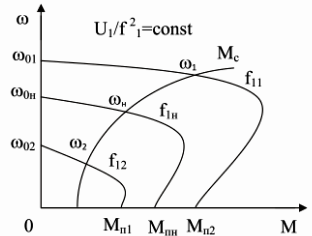
NSF-funktioner för laddning av fläkten
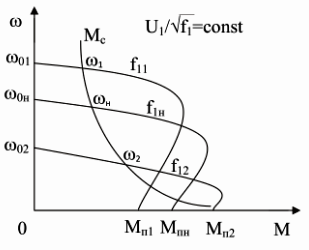
Karakteristika under statisk belastning vridmoment omvänt proportionell mot rotationsvinkelhastigheten
Frekvensreglering av hastigheten på en asynkronmotor gör att du kan ändra rotationsvinkelhastigheten i intervallet — 20 … 30 till 1. Reglering av hastigheten på en asynkronmotor ner från huvudmotorn utförs praktiskt taget till noll.
När frekvensen på försörjningsnätet ändras beror den övre gränsen för rotationshastigheten för en asynkronmotor på dess mekaniska egenskaper, särskilt eftersom den vid frekvenser över den nominella asynkronmotorn arbetar med bättre energiegenskaper än vid lägre frekvenser. Därför, om en växellåda används i drivsystemet, måste denna frekvensstyrning av motorn utföras inte bara ner, utan också upp från den nominella punkten, upp till den maximalt tillåtna rotationshastigheten under villkoren för den mekaniska hållfastheten hos rotorn.
När motorvarvtalet ökar över det värde som anges i dess pass, bör frekvensen för kraftkällan inte överstiga den nominella med högst 1,5 - 2 gånger.
Frekvensmetoden är mest lovande för regleringen av en induktionsmotor med ekorrburrotor. Effektförlusterna med sådan reglering är små, eftersom de inte åtföljs av en ökning av glida… De resulterande mekaniska egenskaperna är mycket stela.