Val av motorer för hissar och lyftmaskiner med kraft
 Moderna passagerar- och godshissar av bostads- och administrativa byggnader, samt vissa maskiner för att lyfta gruvor, utförs med en motvikt eller, som det ibland kallas, med en motvikt. I gruvmaskiner görs balansering, som redan nämnts, ofta inte av en motvikt, utan av ett andra lyftfartyg.
Moderna passagerar- och godshissar av bostads- och administrativa byggnader, samt vissa maskiner för att lyfta gruvor, utförs med en motvikt eller, som det ibland kallas, med en motvikt. I gruvmaskiner görs balansering, som redan nämnts, ofta inte av en motvikt, utan av ett andra lyftfartyg.
Motvikten för hissar är vald för att balansera vikten på lyftfartyget (bilen) och en del av den nominella lasten som ska lyftas:

där GH är vikten av den nominella lyftlasten, N; G0 — kabinvikt, N; Gnp är vikten av motvikten, N; α är balanseringsfaktorn, vanligtvis lika med 0,4-0,6.
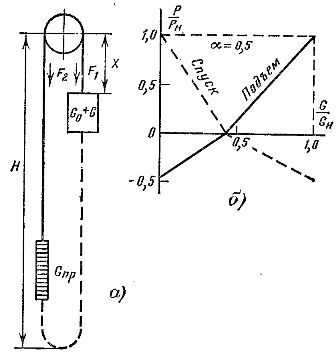
Ris. 1. För att beräkna belastningen på hissmotorns axel.
Behovet av att balansera tunga fartyg är uppenbart, eftersom för att flytta dem i frånvaro av motvikt krävs en motsvarande ökning av motoreffekten. Förmågan att balansera en del av den nominella nyttolasten avslöjas när den ekvivalenta effekten för en given lastkurva bestäms.Det är till exempel inte svårt att följa att om hissen huvudsakligen arbetar för att höja lasten och sänka den tomma vagnen, så har den ekvivalenta motoreffekten enligt lastdiagrammet ett minimum vid α = 0,5.
Närvaron av en motvikt leder till en tillplattad motors belastningskurva, vilket minskar dess uppvärmning under drift. Med hänvisning till diagrammet som visas i FIG. 1, a, sedan med motviktens viktvärde

och frånvaron av ett balansrep och kabinfriktion och motvikten på styrningarna, kan du skriva:


där gk är vikten av 1 m rep, N/m.
Brottgräns

Motoraxelns vridmoment och effekt bestäms utifrån följande formler:
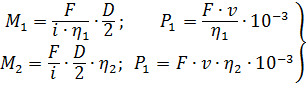
där M1, P1 — vridmoment och effekt när frekvensomriktaren arbetar i motorläge, Nm respektive kW; M2, P2 — vridmoment och effekt när frekvensomriktaren arbetar i generatorläge, Nm respektive kW; η1, η2 — snäckväxeleffektivitet med direkt och omvänd energiöverföring.
Värdena för η1 och η2 beror olinjärt på snäckaxelns hastighet och kan beräknas med formlerna
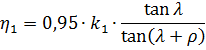

här är λ stigningsvinkeln för spirallinjen på maskens indexeringscylinder; k1 är en koefficient som tar hänsyn till förlusterna i växellådans lager och oljebad; ρ — friktionsvinkel, beroende på snäckaxelns rotationshastighet.
Av formeln för kraften på dragskivan följer att i frånvaro av ett balansrep beror belastningen på lyftvinschens elektriska drivning på lyftfartygets position.
På grund av deras stora lastkapacitet — upp till 10 ton, höga rörelsehastigheter — 10 m/s och mer, höga lyfthöjder på 200-1000 m och tuffa arbetsförhållanden, är minlyftmaskiner utrustade med stålrep med stor massa. Föreställ dig till exempel att det ena passet sänks till den nedre horisonten, medan det andra är ovanför, och i det ögonblicket är det lossat. I detta läge är hela huvudrepet obalanserat, och i början av uppstigningen måste motorn övervinna det statiska momentet som genereras av tyngden av lasten och repet. Balanseringen av repet sker i mitten av hopparnas väg. Sedan går den sönder igen och vikten av den nedåtgående delen av repet hjälper till att lossa motorn.
Ojämn belastning, särskilt i djupa gruvor, leder till behovet av att överskatta motoreffekten.Därför rekommenderas, vid en lyfthöjd på mer än 200-300 m, att balansera huvudlyftlinorna med hjälp av svanslinor som är upphängda av lyftfartygen. Vanligtvis väljs svansrepet med samma tvärsnitt och längd som huvudet, vilket resulterar i att lyftsystemet visar sig vara balanserat.
Eftersom belastningen ändras under driften av hissar och lyftmaskiner, för att bestämma kraften eller momentet hos motoraxeln för varje belastning, är det bekvämt att bygga en graf över beroendet av dessa värden på belastningen på flera punkter, som har ungefär samma karaktär som visas i fig. 1b och använd den sedan för att konstruera lastdiagram.
I detta fall måste driftläget för lyftmaskinens elektriska drivning vara känt, vilket till stor del bestäms av den relativa varaktigheten av PV-aktiveringen och antalet starter per timme av motorn. För hissar, till exempel, bestäms driftsättet för den elektriska drivningen av installationsplatsen och syftet med hissen.
I bostadshus är trafikschemat relativt enhetligt och den relativa varaktigheten — PV och motorstartfrekvens h är lika med 40% respektive 90-120 starter per timme. I höga kontorsbyggnader ökar hissbelastningen kraftigt under timmarna för ankomst och avgång från arbetet och följaktligen under lunchrasten kommer höga värden att ha PV och h-40-60% och 150 -200 starter per timme.
Efter att ritningen är klar statisk belastning på motoraxeln, det elektriska drivsystemet och lyftmotorn har valts, kan det andra steget av att konstruera ett lastdiagram utföras — med hänsyn till effekten av transienten på lastdiagrammet.
För att bygga ett komplett lastdiagram är det nödvändigt att ta hänsyn till tiderna för acceleration och retardation av den elektriska enheten, tiden för öppning och stängning av dörrarna, antalet stopp under bilens rörelse, tiden av in- och utpassagerare under den mest typiska arbetscykeln. För hissar med automatiskt manövrerade dörrar är den totala tidsförlusten som bestäms av driften av dörrarna och fyllningen av bilen 6-8 s.
Tiderna för bilens acceleration och retardation kan bestämmas från rörelsediagrammet om bilens nominella hastighet och de tillåtna värdena för acceleration (retardation) och ryck är kända. Enligt belastningsdiagrammet, byggt enligt de indikerade statiska och dynamiska lägena för det elektriska drivsystemet, är det nödvändigt att göra en beräkning av motorn när den värms upp, med hjälp av en av de välkända metoderna: genomsnittliga förluster eller ekvivalenta värden.
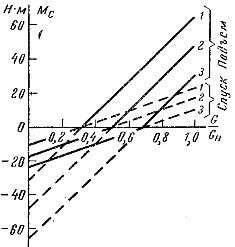
Ris. 2. Beroende av den elektriska drivningens vridmoment på lasten på bilen, hissen, när den senare är på första våningen (1), i mitten av schaktet (2) och på sista våningen (3).

Ett exempel. Enligt tekniska data för en höghastighetspassagerarhiss, bestäm de statiska momenten på motoraxeln i olika driftslägen.
Given:
• maximal lastkapacitet Gn = = 4900 N;
• rörelsehastighet v = 1 m/s;
• lyfthöjd H = = 43 m;
• kabinvikt G0 = 6860 N;
• motvikt Gnp = 9310 N;
• dragbalkens diameter Dm = 0,95 m;
• utväxlingsförhållande för vinschväxellådan i = 40;
• transmissionseffektivitet, med hänsyn till kabinfriktionen på axelstyrningarna η = 0,6;
• vikten på repet GKAH = 862 N.
bord 1

Brottgräns:


När hisssystemet fungerar, när Fc > 0, arbetar den drivande elektriska maskinen i motorläge och när Fc är 0, och i motorläge när Fc < 0.
Resultaten av beräkningen av de statiska momenten enligt formeln sammanfattas i en tabell. 1 och visas i diagrammet i fig. 2.Observera att mer exakta beräkningar bör ta hänsyn till motståndet mot rörelsen hos axelstyrningarna, vilket är 5-15% av Fc.